Recently,
I have started applying my know-how in whole-body control to the
analysis and artificial control of human movement. In this area, I use
multi-contact control techniques to generate motion patterns of
subjects supporting their bodies with hands and feet, and interactive
realtime walking pattern generators to generate practical motions
needed to walk with artificial aids. I have also designed with my
colleagues at Stanford a new algorithm to directly map Cartesian-space
marker trajectories into humanoid models without the need of inverse
kinematic projections, providing a quick tool to analyze human movement.
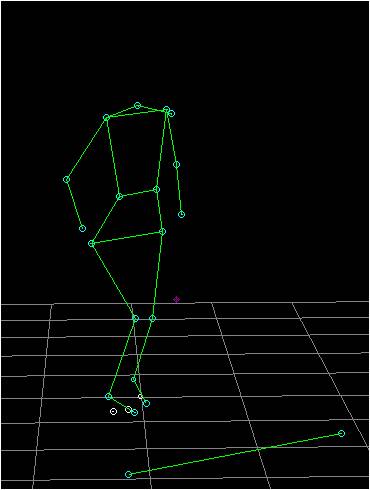
Motion capture of paraplegic individual with walking aid: Mocap tracking tools help us to map human motion into full body simulations of the human body.
Simulation of body support with hands and feet: We use multicontact control techniques to create interactive torque control patterns to support the body with hands and feet.
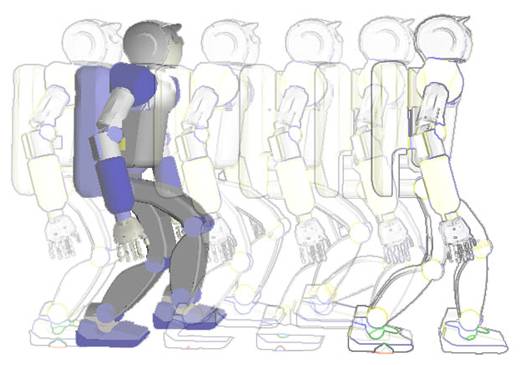
Artificial walking:
We create humanl-ike walking behaviors by planning the trajectories of
contact centers of pressure associated with the robot’s contacts and
using the resulting center of mass trajectory to synchronize footsteps
in a stable locomotion pattern.
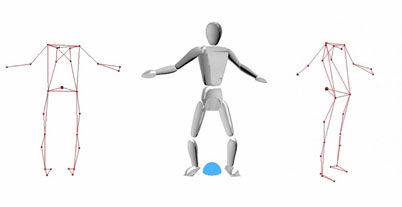
Mapping mocap data:
We apply a direct Cartesian-space marker mapping technique to project
mocap trajectories into humanoid models of test subjects.
ROBOTICS
Luis Sentis, Jessica Rose, Artificial Gait Generation, Proposal for NIH (under preparation), April 2009.
Oussama Khatib, Emel Demircan, Vincent DeSapio, Luis Sentis, Thor Besier, Scott Delp, Robotics-based Synthesis of Human Motion, Journal of Biomechanics (accepted on March 2009, in press).
Emel Demircan, Luis Sentis, Vincent De Sapio, and Oussama Khatib, Human motion reconstruction by direct control of marker trajectories, (In press) Advances in Robot Kinematics (ARK), Springer, 11th International Symposium, Batz-sur-Mer, France, June 2008.
Oussama Khatib, James Warren, Vincent De Sapio, Luis Sentis, Human-Like Motion From Physiologically-Based Potential Energies, Advances in Robot Kinematics, Kluwer Academic Publishers, first edition, 2004, pp. 149-163.