|
Data Repository for
Haptic Algorithm Evaluation
|
 |
Emanuele Ruffaldi1, Dan Morris2, Timothy
Edmunds3, Dinesh Pai3, and Federico
Barbagli2
1PERCRO, Scuola Superiore S. Anna
2Computer Science Department, Stanford University
3Computer Science Department, Rutgers University
pit@sssup.it, {dmorris,barbagli}@robotics.stanford.edu,
{tedmunds,dpai}@cs.rutgers.edu
[overview]
[data pipeline]
[data formats]
[data sets]
[code]
[example analyses]
[user contributions]
[contact]
Overview
This page hosts the public data repository described in our 2006
Haptics Symposium paper: Standardized Evaluation of Haptic
Rendering Systems.
The goal of this repository is threefold:
- To provide publicly-available data sets that describe the forces resulting
when a probe is scanned over the surface of several physical objects, along
with models of those objects. This data can serve as a "gold standard" for
haptic rendering algorithms, providing the "correct" stream of forces that
should result from a particular scanning trajectory.
- To provide a standard set of analyses that can be performed on particular
implementations of haptic rendering algorithms, allowing objective
and standardized evaluations of those algorithms.
- To present the results of these analyses collected from several
publicly-available implementations of haptic rendering algorithms, as
reference data and as examples of potential applications of these data sets.
Data Processing Pipeline
Physical models are scanned and used for analysis of haptic rendering
techniques according to the following pipeline; we use the term
trajectory to refer to a stream of positions and forces.
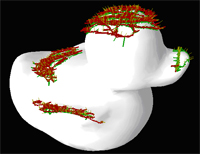
- Scanning: The HAVEN at Rutgers
University is used to scan several aspects of a physical model. First, the
object is scanned with a laser range scanner to obtain a precise polygonal
model of the surface. An optically-tracked force sensor is then
scanned manually across the surface of the object, providing position
and orientation information that is time-referenced to force and torque
data. We call this recorded trajectory a raw trajectory.
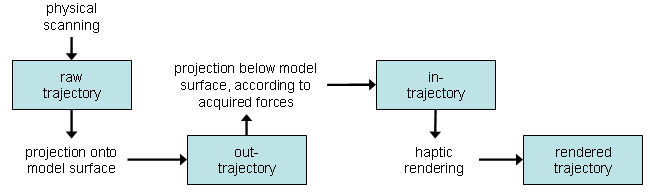
- Out-trajectory generation: We can determine when our scanning
probe was in contact with the object using normal force informaiton.
Whenever the probe was in contact with the object, the reported position data
should contain points that lie on the surface of the object. However,
due to small amounts of noise in our measurement, the recorded path
deviates slightly from the surface of the object. We therefore project this
trajectory onto the surface of the object whenever the force data confirms
that the probe was in contact with the object. We call this slightly-
modified trajectory an out-trajectory.
- In-trajectory generation: Haptic rendering systems often depend on
allowing a haptic probe to penetrate the surface of a rigid object before
penalty forces are applied to the haptic device. The data collected from the
physical scan of a rigid object contains normal forces and a trajectory that
lies entirely on the surface of the object. We therefore analytically
compute a trajectory that moves below the surface of the object that - if
passed as input to an ideal haptic rendering algorithm, would apply
the same forces to the haptic device that we measured in our physical scan,
and would graphically present a surface contact point that corresponds to the
trajectory we measured in our physical scan. We call this hypothetical
trajectory an in-trajectory.
- Haptic rendering: This in-trajectory can then be fed to any haptic
rendering algorithm, in place of the position data that would typically come
from a haptic device. The haptic rendering algorithm will generate a stream
of forces (which would typically be applied to a haptic device) and -
generally - a surface contact position (which would typically be rendered
graphically). We call this trajectory a rendered trajectory.
Comparing our rendered trajectory to our raw trajectory
provides a quantitative basis for evaluating a haptic rendering
technique. This page will soon include quantitative results comparing various rendering algorithms according to the metrics presented in our paper.
This pipeline is summarized in the following diagram:
Data Formats
This section describes the data formats in which all files on this page are
presented.
- Mesh files, representing scanned object geometry, will be presented in
.obj format. Meshes will be in the same reference frame as the corresponding data files.
- Trajectory files are presented as .traj files, tab-delimited
ASCII files containing position and force data, plus associated
metadata.
The first section of a .traj file contains comments and metadata; each line
begins with '#' and may contain one metadatafield, of the format:
[field name]=[field value]
A field value extends from the '=' to the end of the line, and is generally
a single number but may be text for some fields. The metadata portion
of the file is terminated with the token DATA_START; all subsequent lines
contain trajectory data.
A typical header looks like:
# points=31800
# columns=8
# column_labels=time(s) X(mm) Y(mm) Z(mm) Fx(N) Fy(N) Fz(N) ctime(s)
# DATA_START
This indicates that the field contains 31800 data points organized in 8
columns, labeled according to the field 'column_labels'. Other fields
may appear in a data file to indicate particular parameters that were
used to generate that file.
The data portion of the file is tab-delimited and formatted according to:
[time] [x] [y] [z] [Fx] [Fy] [Fz] [computation time] [...optional orientation fields...] [...optional torque fields...]
The "time offset" metadata field is for interal debugging only; it is not meaningful to other users of this data.
The "computation time" data field is meaningful only for computational
results; it indicates how much time was spent computing this
particular data point (i.e. it excludes time related to disk i/o, graphic
rendering, etc.).
Data Sets
This section contains several data sets acquired with our scanner and
processed with the pipeline described above. Data is specified in the
.traj format defined above. Note that the forces in an "in-trajectory"
file are defined to be zero, and the normal forces in an "out-trajectory"
file are defined to be one or zero, representing contact or non-contact
with the object surface.
- plane0.zip (400KB) contains the trajectory files describe above, for a simple plane. The following files are included:
- probe.traj: the raw trajectory
- out.traj: the out-trajectory
- in.traj: the in-trajectory, computed using a stiffness of .5N/mm
- proxy.traj: the rendered trajectory, computed using the proxy
algorithm as implemented in CHAI 1.25
- potential.traj: the rendered trajectory, computed using a
potential-field algorithm that applies a penalty force to the nearest
surface point at each iteration
- plane_4.obj: a mesh representing the plane
|
 |
Code
This section contains utility code used to process our data formats, and will
later be updated to include example analyses. Also see CHAI 3D for the haptic and graphic rendering
code used for our analyses.
- read_traj_file.m, a Matlab function for
reading the contents of a .traj file, including all data and metadata.
- plot_trajectories.m, a Matlab script for
graphing the positions and forces presented in a series of .traj files. Uses
the previous function (read_traj_file) for file input.
The output of this function, when run on the plane data set provided above, looks like this (click for a larger image):
Example Analyses
This section contains several analyses performed using the above data. The
results presented here serve as reference data for comparison to other
algorithms/implementations, and the approaches presented here provide
examples of potential applications for this repository.
1. Friction Identification
The duck model and trajectories provided above were
used to find the optimal (most realistic) coefficient of dynamic friction
for haptic rendering of this object. This analysis uses the friction
cone algorithm available in CHAI 3D
(version 1.31). The in-trajectory derived from the physical-scanned
(raw) trajectory is fed to CHAI for rendering, and the resulting forces
are compared to the physically-scanned forces. The coefficient of dynamic
friction is iteratively adjusted until a minimum error between the physical
and rendered forces is achieved.
This analysis demonstrates the use of our repository for improving the
realism of a haptic rendering system, and also quantifies the value of
using friction in a haptic simulation, in terms of
mean-squared-force-error.
Results for the no-friction and optimized-friction cases follow, including
the relative computational cost in floating-point operations:
| dynamic friction radius (mm) | RMS force
error (N) | Floating-point Ops |
| 0.00000 (disabled) | 0.132030 | 10.36M |
| 0.300800 | 0.0673061 | 10.77M |
Friction identification: summary of results
We observe that the trajectory computed with friction enabled contains
significantly lower force-vector-error than the no-friction trajectory,
indicating a more realistic rendering, with a negligible increase
in floating-point computation.
- duck_friction_example.zip (400KB)
contains all the files used for this analysis:
- raw-Back.traj: the raw trajectory (a subset of the above duck trajectory, collected on the "back" of the duck)
- out-Back-3.traj: the out-trajectory
- in-Back-3.traj: the in-trajectory, computed using a stiffness of .5N/mm
- proxy-Back-3-friction.traj: the rendered trajectory, computed using the proxy
algorithm as implemented in CHAI 1.31 and
a dynamic friction radius of 0.3008mm (the optimized value obtained from the
iterative process described above)
- proxy-Back-3-flat.traj: the rendered trajectory, computed using
the same proxy but no friction
- duck001_3k.obj: a mesh representing the duck, reduced to 3000
polygons for faster computation (used for all of these trajectories)
2. Comparison Between Proxy (god-object) and Voxel-Based Haptic Rendering
The duck model and trajectories provided above were
used to compare the relative force errors produced by proxy (god-object)
and voxel-based haptic rendering algorithms for a particular trajectory, and
to assess the impact of voxel resolution on the accuracy of voxel-based
rendering. This analysis does not include any cases in which the proxy
provides geometric correctness that the voxel-based rendering could not;
i.e. the virtual haptic probe never "pops through" the model.
Voxel-based rendering was performed by creating a fixed voxel grid and
computing the nearest triangle to each voxel center. The stored triangle
positions and surface normals are used to render forces for each voxel
through which the probe passes.
Results for the proxy algorithm and for the voxel-based algorithm (at two
resolutions) follow, including the computational cost in
floating-point operations, the initialization time in seconds (on a 1.5GHz
Pentium), and the memory overhead:
| Algorithm | Voxel Resolution |
RMS Force Error (N) | Floating-point
Ops | Init Time (s) | Memory |
| voxel | 323 | .136 | 484K | 0.27 | 1MB |
| voxel | 643 | .130 | 486K | 2.15 | 8MB |
| proxy | | .129 | 10.38M | 0.00 | 0 |
Proxy vs. voxel comparison: summary of results
We observe that the voxel-based approach offers comparable force error and
significantly reduced online computation, at the cost of significant
preprocessing time and memory overhead, relative to the proxy (god-object)
approach. Analysis of this particular trajectory does not capture the
fact that the proxy-based approach offers geometric correctness
in many cases where the voxel-based approach would break down.
- duck_voxel_example.zip (400KB)
contains all the files used for this analysis:
- raw-Back.traj: the raw trajectory (a subset of the above duck trajectory, collected on the "back" of the duck)
- out-Back-3.traj: the out-trajectory
- in-Back-3.traj: the in-trajectory, computed using a stiffness of .5N/mm
- proxy-Back-3-flat.traj: the rendered trajectory, computed using the proxy
algorithm
- voxel32-Back-3.traj: the rendered trajectory, computed using the
voxel-based algorithm with 323 voxels
- voxel64-Back-3.traj: the rendered trajectory, computed using the
voxel-based algorithm with 643 voxels
- duck001_3k.obj: a mesh representing the duck, reduced to 3000
polygons for faster computation (used for all of these trajectories)
3. Quantification of the Impact of Force Shading on Haptic Rendering
The duck model and trajectories provided above were
used to quantify the impact of force shading on the accuracy of haptic
rendering of a smooth, curved object. Force shading uses interpolated
surface normals to determine the direction of feedback within a surface
primitive, and is the haptic equivalent of Gouraud shading. Friction
confounds the effects of force shading, so the forces contained in each
out-trajectory were projected onto the surface normal of the
"true" (maximum-resolution) mesh before performing these evaluations.
Results are presented for several polygon-reduced versions of the duck model,
including the average compute time per haptic sample (on a 3GHz P4) and the
total computational cost in floating-point operations (for the complete
trajectory). We also indicate the percentage reduction in RMS force error
due to force shading.
| Model Size (kTri) | Shading Enabled | Mean
Compute Time (us) | Floating-point
Ops | RMS Force Error (N) | Error Reduction (%) |
| 0.2 | false | 10.1725 | 9.7136M | 0.0852431 | |
| 0.2 | true | 15.2588 | 12.176M | 0.0845509 | 0.81 |
| 0.5 | false | 10.1725 | 10.361M | 0.0305367 | |
| 0.5 | true | 15.2588 | 12.961M | 0.0230916 | 24.3 |
| 1 | false | 10.1725 | 9.7921M | 0.0310648 | |
| 1 | true | 15.2588 | 12.383M | 0.0230333 | 25.9 |
| 3 | false | 10.1725 | 10.380M | 0.0223957 | |
| 3 | true | 15.2588 | 12.744M | 0.0143149 | 36.0 |
| 6 | false | 10.1725 | 10.560M | 0.0164838 | |
| 6 | true | 15.2588 | 13.244M | 0.0125079 | 24.1 |
| 9 | false | 10.1725 | 10.644M | 0.0154634 | |
| 9 | true | 15.2588 | 13.476M | 0.0121254 | 21.6 |
| 64 | false | 10.1725 | 10.064M | 0.0129949 | |
| 64 | true | 15.2588 | 13.174M | 0.0111003 | 14.6 |
| 140 | false | 10.1725 | 9.2452M | 0.00859607 | |
| 140 | true | 15.2588 | 11.870M | 0.00891852 | -3.75 |
Force shading: summary of results
We observe that force shading results in a significant reduction in RMS force
error - as much at 36% - for models of typical size, at some cost
(approximately 20%) in floating-point operations). For models at the
maximum available resolution, force shading is not expected to contribute
significantly to rendering quality, and indeed we see the error reduction
fall off as meshes get very large. For models that are reduced to only
several hundred polygons, the geometry no longer effectively captures the shape
of the original mesh, and we see a falloff in error reduction as the quality
of rendering decreases.
- duck_shading_example.zip (7MB)
contains all the files used for this analysis:
- probe-Back.traj: the raw trajectory (a subset of the above duck trajectory, collected on the "back" of the duck)
- out-Back-projected-*.traj: the out-trajectory for each of the
polygon-reduced versions of the duck
- in-Back-projected-*.traj: the in-trajectory for each of the
polygon-reduced versions of the duck
- proxy-Back-projected-*-flat.traj: the rendered trajectory for each of the
polygon-reduced versions of the duck, with shading disabled
- proxy-Back-projected-*-shade.traj: the rendered trajectory for each of the
polygon-reduced versions of the duck, with shading ensabled
- duck001_*.obj: a mesh file for each of the polygon-reduced
versions of the duck model
User Contributions
We hope to significantly expand the data sets available here over the coming
months, and we welcome any of the following from users of this
repository:
- Additional analyses performed using these data sets to evaluate specific
haptic rendering algorithms or implementations
- Additional metrics that we can use to evaluate haptic trajectories (in
place of our mean-squared-force-error metric), ideally (but not necessarily) implemented in Matlab
- Additional rendering algorithms, ideally (but not necessarily) implemented as subclasses of CHAI's
proxy, on which we can run evaluations using our trajectories
- Additional data that you may be able to collect from a similar scanning
apparatus
Contact
Please email us with any
contributions, questions, or to discuss the data presented here. We welcome any
information you have about how you're using this data or how it could be made
more useful.
Written and maintained by Dan
Morris
Support for this work was provided by NIH grant LM07295, the AO Foundation,
and NSF grants IIS-0308157, EIA-0215887, ACI-0205671, and EIA-0321057.
Any opinions, findings, and conclusions or recommendations expressed in
this material are those of the author(s) and do not necessarily reflect
the views of the National Science Foundation.