Mechanical Search on Shelves using Lateral Access X-RAY
Huang Huang*, Marcus Dominguez-Kuhne*, Jeffrey Ichnowski, Vishal Satish, Michael Danielczuk, Kate Sanders, Andrew Lee, Anelia Angelova, Vincent Vanhoucke, Ken Goldberg
ICRA 2021, under submission

Abstract
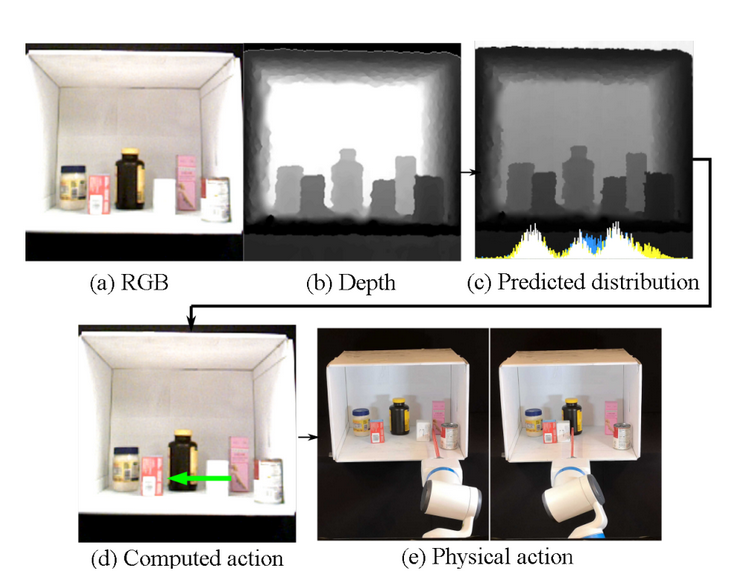
Efficiently finding an occluded object with lateral access arises in many contexts such as warehouses, retail, healthcare, shipping, and homes. We introduce LAX-RAY (Lateral Access maXimal Reduction of occupancY support Area), a system to automate the mechanical search for occluded objects on shelves. For such lateral access environments, LAX-RAY couples a perception pipeline predicting a target object occupancy support distribution with a mechanical search policy that sequentially selects occluding objects to push to the side to reveal the target as efficiently as possible. Within the context of extruded polygonal objects and a stationary target with a known aspect ratio, we explore three lateral access search policies: Distribution Area Reduction (DAR), Distribution Entropy Reduction (DER), and Distribution Entropy Reduction over Multiple Time Steps (DER-MT) utilizing the support distribution and prior information. We evaluate these policies using the First-Order Shelf Simulator (FOSS) in which we simulate 800 random shelf environments of varying difficulty, and in a physical shelf environment with a Fetch robot and an embedded PrimeSense RGBD Camera. Average simulation results of 87.3% success rate demonstrate better performance of DER-MT with 2 prediction steps. When deployed on the robot, results show a success rate of at least 80% for all policies, suggesting that LAX-RAY can efficiently reveal the target object in reality. Both results show significantly better performance of the three proposed policies compared to a baseline policy with uniform probability distribution assumption in non-trivial cases, showing the importance of distribution prediction.