STAIR 1.0

STAIR 2.0
STAIR, the STanford AI Robot
Many of us already have robots in our homes today. They're called the dishwasher, the washing machine, and the dryer. We believe that a revolution in robotics will come when, instead of building such special-purpose robots, we can instead build a single robot that can carry out a wide range of tasks. In the STAIR (STanford Artificial Intelligence Robot) project, we seek to build such a robot, and spark off this revolution in robotics. More details about STAIR project are here.STAIR --- Perception/Manipulation group
In our manipulation and perception group, we develop algorithms that let the robot learn to perceive the environment, and perform manipulation tasks. More concretely, we want to have the robots the following functionalities:
- Pick up any object lying in home or office.
- Unload a dishwasher.
- Fetch an object from an office, in response to a verbal request.
- Prepare simple meals using a normal household kitchen.
- Tidy up a living-room after a party, including picking up and throwing away trash, and loading the dishwasher.
- Using multiple tools (screwdriver, hammer, pliers, etc.) as needed, assemble a bookshelf.
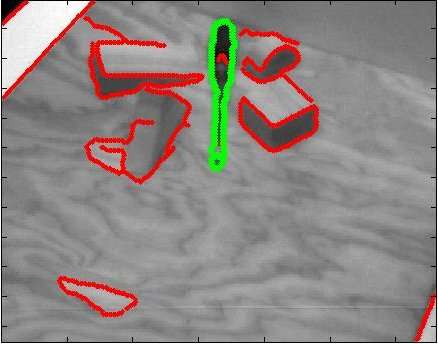
Projects --- Grasping
We develop perception and manipulation algorithms for STAIR robots. In the past, we developed a algorithm that allows robots to grasp an object that were previously unseen. This capability allowed STAIR to perform tasks such as unload items from a dishwasher. More details about the algorithm are on Grasping and Cluttered Grasping page.Recently, the grasping capablity along with integration with navigation, object recognition speech recognition and navigation allowed STAIR to fetch an object from an office in response to a verbal request completely autonomously.
Projects --- Cooking
Currently, perception-manipulation group is focussing on teaching the robot to cook simple kitchen meals.
Projects --- Opening New Doors
In this project, the robots learn to open new doors and open elevators, ones that were never seen by the robot before in the training set.