Terrain Classification
This page includes:
Terrain classification is very useful for autonomous
mobile robots in
real-world environments for path planning, target detection, and as a
pre-processing step for other perceptual tasks. We were provided with a
large dataset acquired by a robot equipped with a SICK2 laser scanner.
The robot drove around a campus environment and acquired around 35
million
scan readings. Each reading was a point in 3D space, represented by its
coordinates in an absolute frame of reference. Thus, the only available
information is the location of points, which was fairly noisy because
of
localization errors.
Our task is to classify the laser range points into
four classes:
ground, building,
tree, and shrubbery.
Since classifying ground
points is trivial given their absolute z-coordinate, we classify them
deterministically by thresholding the z coordinate at a value close to
0. After we do that, we are left with approximately 20 million
non-ground
points. Each point is represented simply as a location in an absolute
3D
coordinate system. The features we use require pre-processing to infer
properties of the local neighborhood of a point, such as how planar the
neighborhood is, or how much of the neighbors are close to the ground.
The
features we use are invariant to rotation in the x-y plane, as well as
the
density of the range scan, since scans tend to be sparser in regions
farther from the robot.
Our first type of feature is based on the principal
plane around it. For each
point we sample 100 points in a cube of radius 0.5 meters. We run PCA
on
these points to get the plane of maximum variance (spanned by the first
two
principal components). We then partition the cube into 3x3x3 bins
around
the point, oriented with respect to the principal plane, and compute
the
percentage of points lying in the various sub-cubes. We use a number of
features derived from the cube such as the percentage of points in the
central column, the outside corners, the central plane, etc. These
features
capture the local distribution well and are especially useful in
finding
planes. Our second type of feature is based on a column around each
point. We take a cylinder of radius 0.25 meters, which extends
vertically to include all the points in a "column". We
then compute what percentage of the points lie in various segments of
this
vertical column (e.g., between 2m and 2.5m). Finally, we also use an
indicator feature of whether or not a point lies within 2m of the
ground. This feature is especially useful in classifying shrubbery.
For training we select roughly 30 thousand points
that represent the
classes well: a segment of a wall, a tree, some bushes.
We considered three different models: SVM, Voted-SVM and
AMNs.
All methods use the same set of features, augmented with a quadratic
kernel.
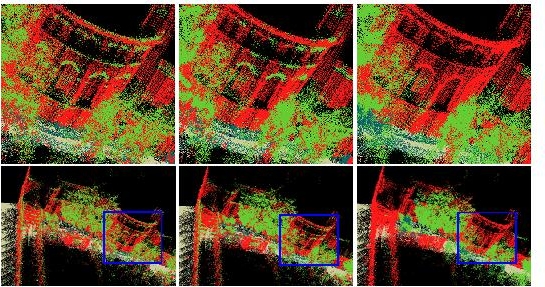
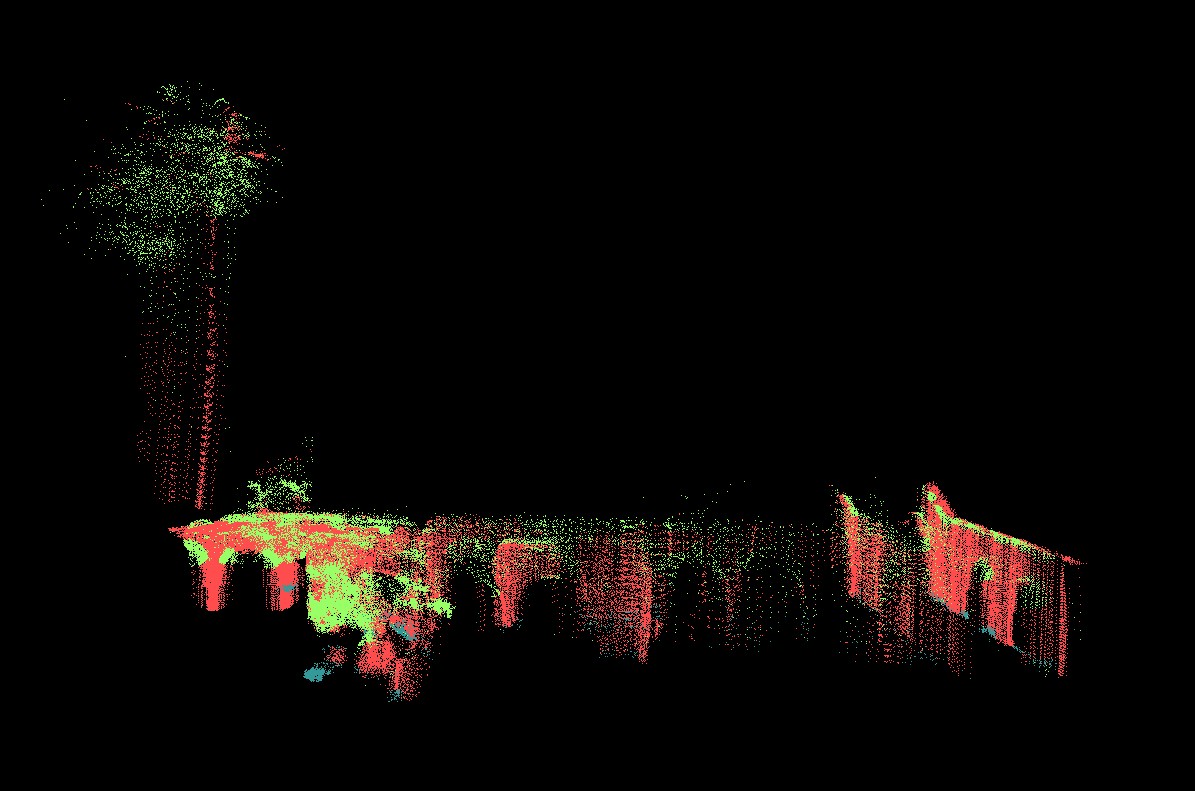
The first model is a multi-class SVM with a quadratic
kernel over the
above features. This model (right panel) achieves reasonable
performance
in many places, but fails to enforce local consistency of the
classification predictions. For example arches on buildings and other
less planar regions are consistently confused for trees, even though
they
are surrounded entirely by buildings.
We improved upon the SVM by smoothing its predictions
using voting. For
each point we took its local neighborhood (we varied the radius to get
the
best possible results) and assigned the point the label of the majority
of
its 100 neighbors. The Voted-SVM model (middle panel) performs
slightly better than SVM: for example, it smooths out trees
and
some parts of the buildings. Yet it still fails in areas like arches of
buildings where the SVM classifier has a locally consistent
wrong
prediction.
The final model is a pairwise AMN over laser scan
points, with associative
potentials to ensure smoothness.
Each point is connected to 6 of its neighbors: 3 of them are sampled
randomly from the local neighborhood in a sphere of radius 0.5m, and
the other 3 are sampled at random from the vertical cylinder column of
radius 0.25m. It is important to ensure vertical consistency since
the {\sf SVM} classifier is wrong in areas that are higher off
the ground (due to the decrease in point density) or because objects
tend to look different as we vary their z-coordinate (for example, tree
trunks and tree crowns look different). While we experimented with a
variety of edge features including various distances between points,
we found that even using only a constant feature performs well.
We trained the AMN model using CPLEX to solve the
quadratic program; the
training took about an hour on a Pentium 3 desktop. For inference, we
used
min-cut combined with the alpha-expansion algorithm of Boykov et al.
described above. We split up the dataset into 16 square
(in the xy-plane) regions, the largest of which contains around 3.5
million points. The implementation is largely dominated by I/O time,
with
the actual min-cut taking less than a minute even for the largest
segment.
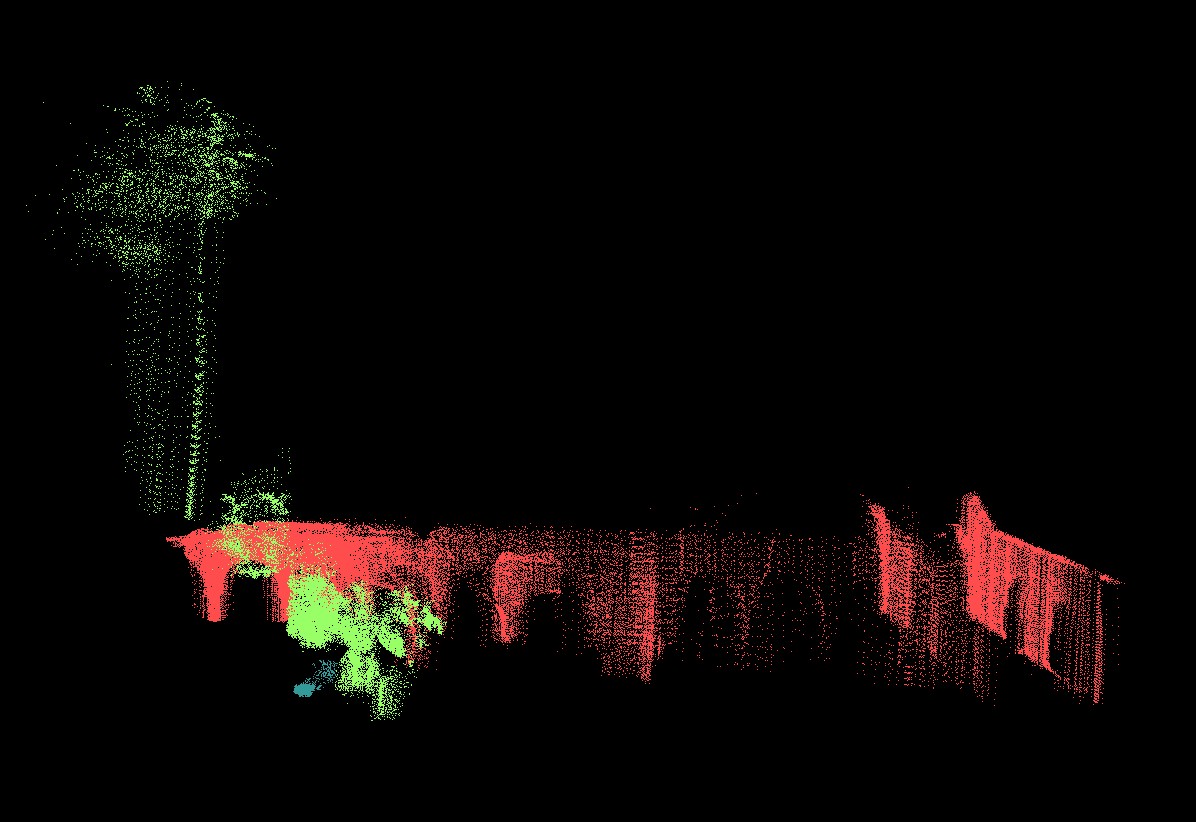
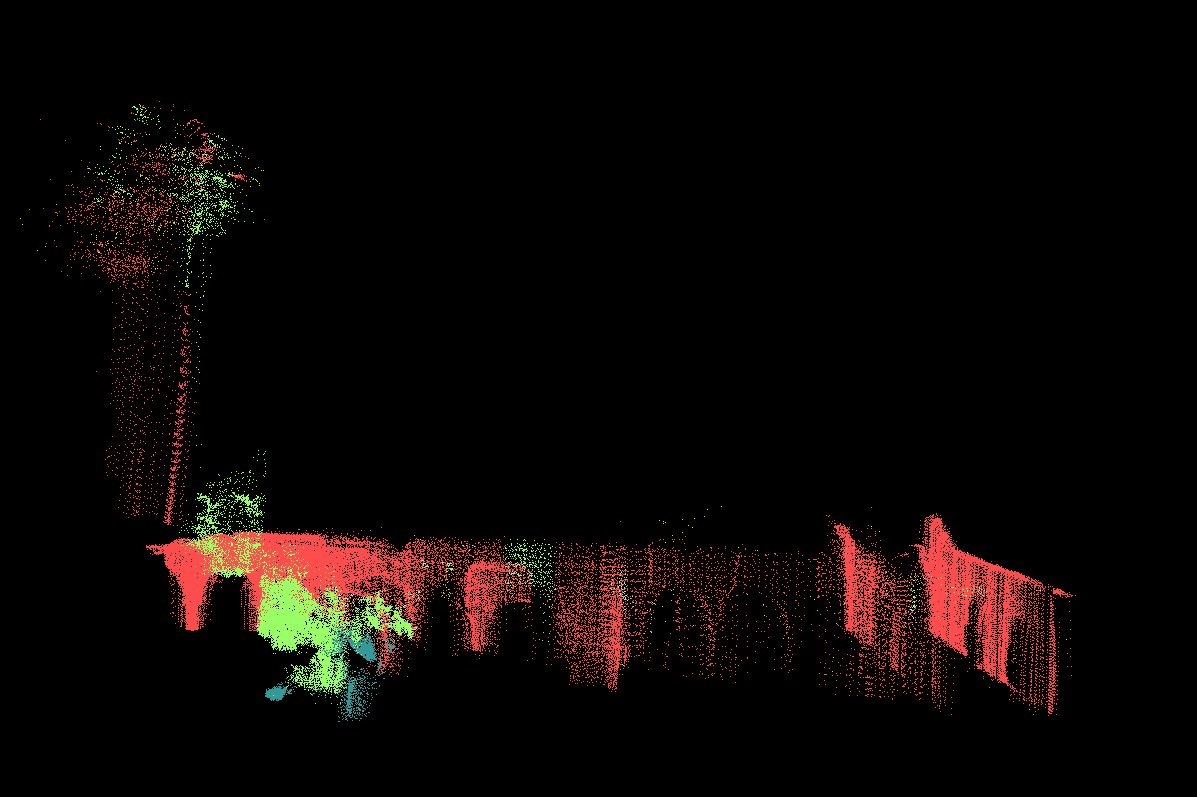
We can see that the predictions of the AMN (left
panel) are much smoother:
for example building arches and tree trunks are predicted correctly. We
hand-labeled around 180 thousand points of the test set and computed
accuracies of the predictions (excluding ground, which was classified
by
pre-processing). The differences are dramatic: SVM: 68%,
Voted-SVM: 73% and AMN: 93%.
This fly-through
movie
shows a part of the dataset labeled by the AMN model. To view, unzip
the file and use Quicktime (or your favorite mpeg4 viewer).
Below are the enlarged images of the results shown
in the paper:
Below are the images of the labeled portion of the
test set:
| Labeled test image (180K points) |
 |
| SVM |
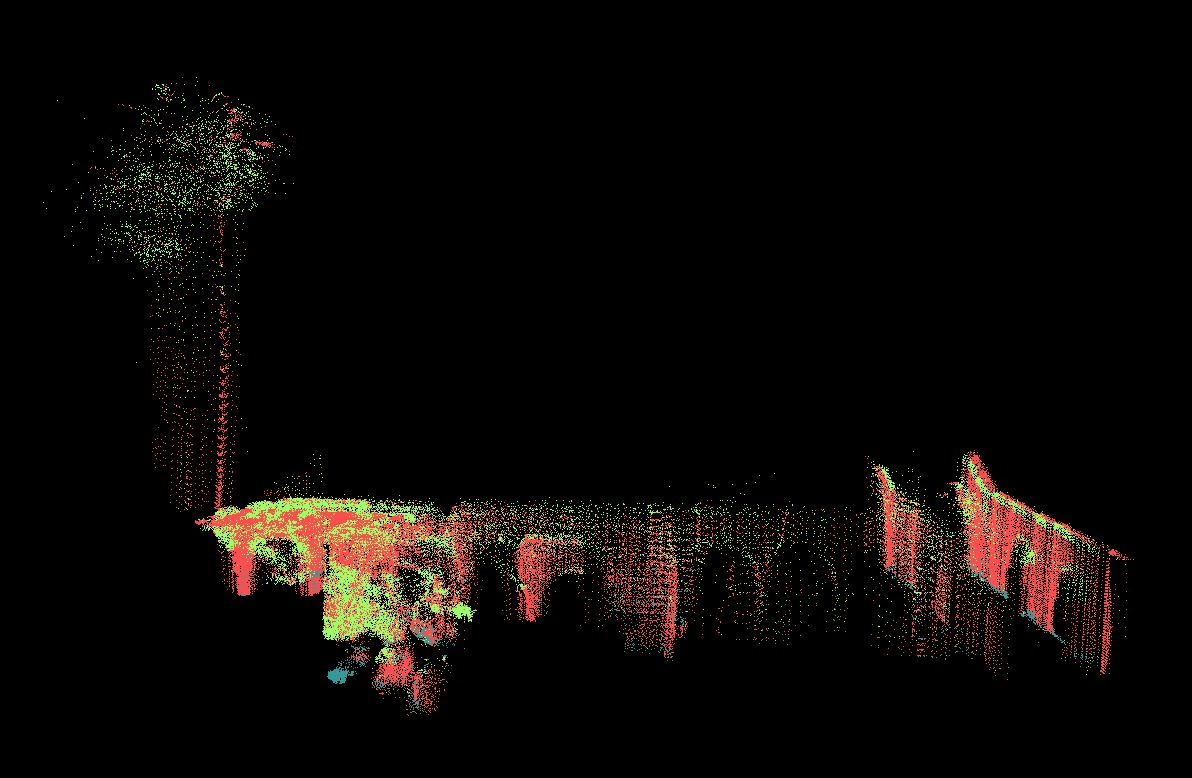 |
| Voted-SVM |
 |
| AMN |
 |






