In
this area of research I address multi-vehicle coordination and control
under network management constraints. Under my supervision, we have
created a control
architecture and quering system that enables the realtime control and
simulation of large groups of vehicles maintaining a network
topology while navigating through vast topological areas with
geographical constraints. These architecture combines reactive
prioritized
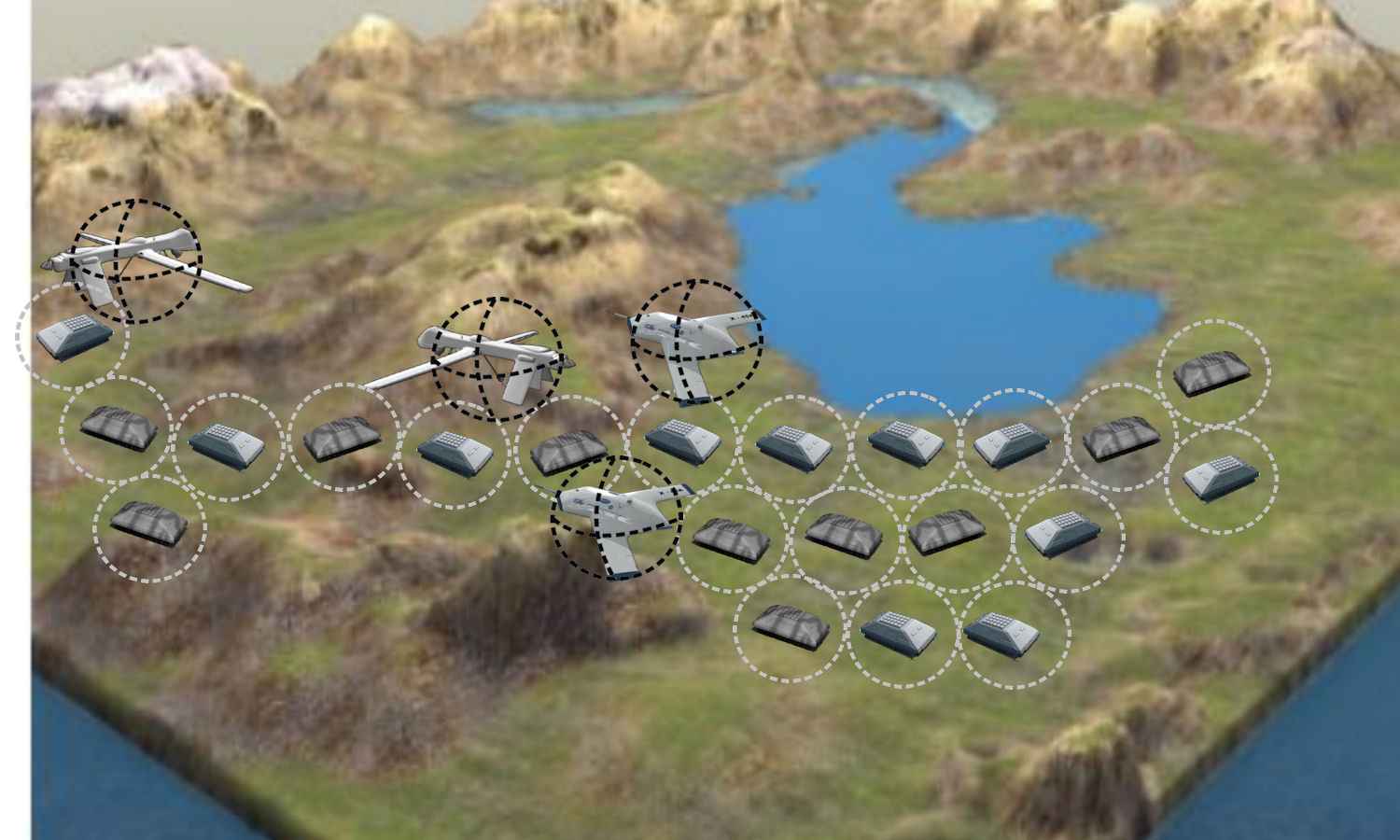
multi-task approaches with task-based planners. In the image below it
is shown and Illustration of a UGV/UAV exploration scenario.
Funding source: The Boeing Company
Years: 2008-2009
Resources: $350,000
Research coordinator: Dr. Luis Sentis
Student: Mike Mintz (MS, CS)
Funding source: The Boeing Company
Years: 2008-2009
Resources: $350,000
Research coordinator: Dr. Luis Sentis
Student: Mike Mintz (MS, CS)
| Click image to play video (Format: WMV, Size: 68MB) | Click image to play video (Format: WMV, Size: 81MB) |
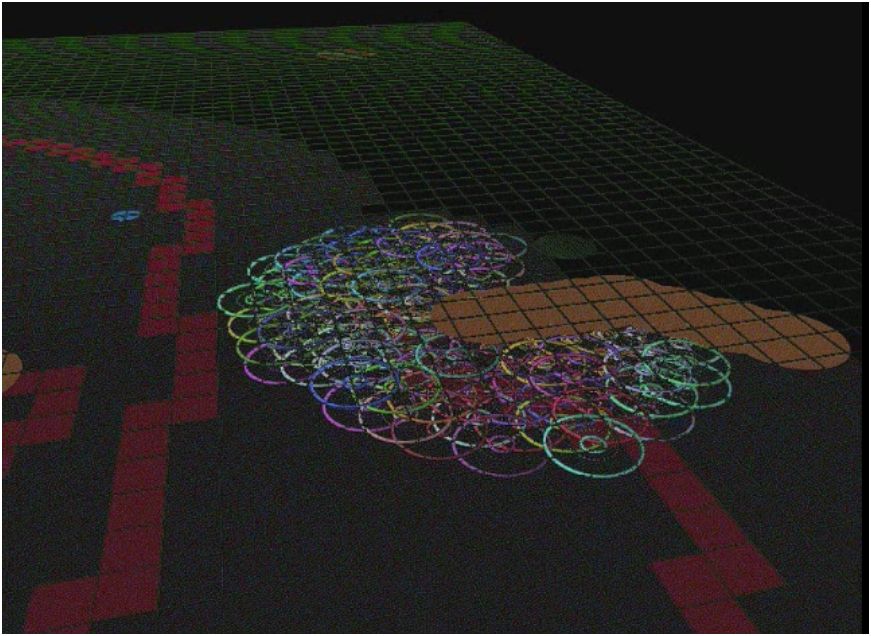 | 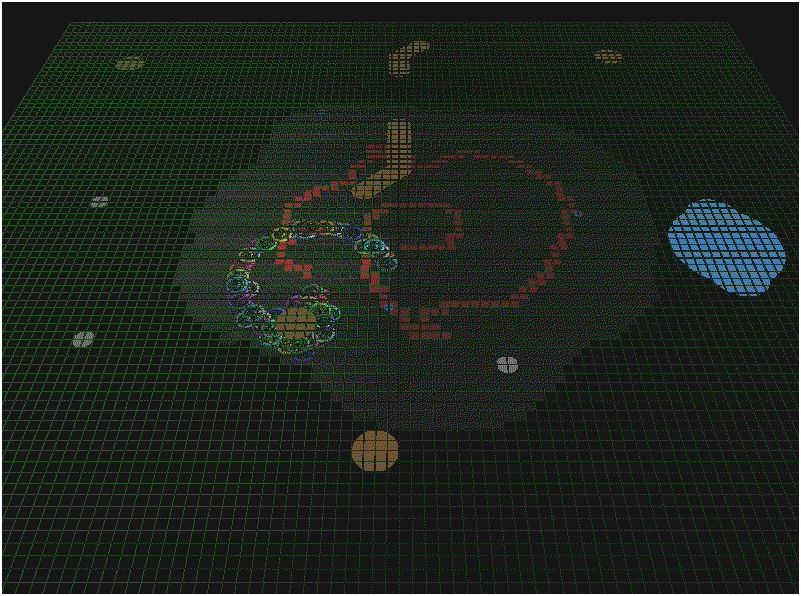 |
| Exploration behavior with disc formation: Number of vehicles is 100; grid squares are 1km in size; maximum network external disc coverage is 2km in diameter and minimum network separation is 1km; exploration pattern consists of concentric circles around the terrain; formation topology is a pack of minimal volume; brown obstacles are mountains, blue obstacles are lakes, and grey obstacles are cities; vehicle and group maximum speeds ares 50km/h; simulation speed is 360x; total grid area is 100km x 100km. | Exploration behavior with ring formation: Number of vehicles is 50; formation topology is based on a ring potential attractor allowing higher swapping area per periodic circle; all other parameters are identical to the exploration behavior on the left. |
OBOTICS
PUBLICATIONS