|
The goal of this project is to computationally synthesize motion primitives for humanoids (with complex dynamics) and digital actors (using musculo-skeletal models). |
Achievement So Far
|
We have been able to autonomously synthesize jumping motion using Probabilistic Roadmaps (PRMs). |
Significance of our Achievement
|
We have essentially shown that PRMs are powerful enough to synthesize motions as complex as jumping. |
Some Results
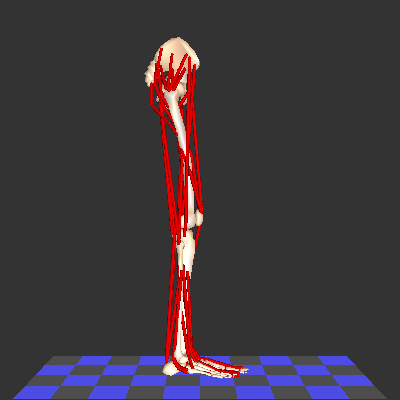 1(a) |
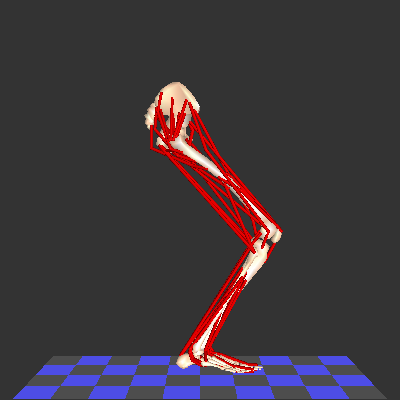 1(b) |
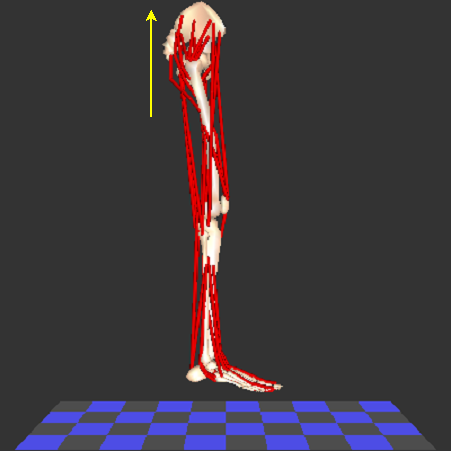 1(d) |
|
To be able to jump from the configuration shown in Fig. 1(a), the leg musculo-skeletal model has to first bend at the knees as shown in Fig. 1(b). Our motion planner was able to learn this by itself as seen in the "crude" animation of the result below: |
 Result from our motion planner SOME BROWSERS MAY NOT BE ABLE TO SHOW THE PART WHEN THE LEG LEAVES THE GROUND. SO WATCH THE AVI INSTEAD: Download AVI |
|
Note that the motion is not smooth in the initial phase. This is because we didnt optimized the output from the PRM planner. |

|
|
|