|
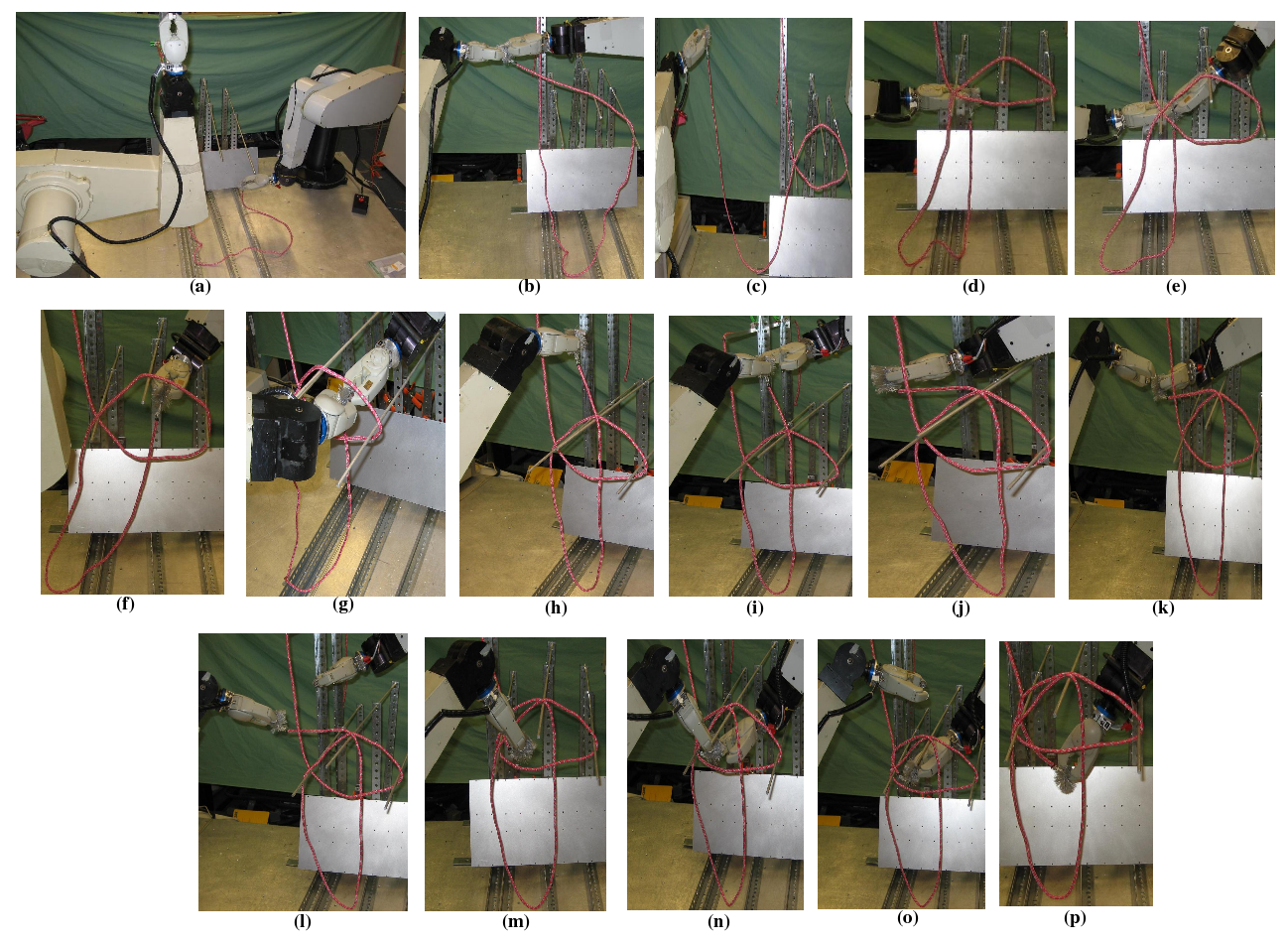
Research on robotic manipulation has mainly focused on manipulating rigid objects so far. However, many important application domains require manipulating deformable objects, especially deformable linear objects (DLOs), such as ropes, cables, and sutures. Such objects are far more challenging to handle, as they can exhibit a much greater diversity of behaviors. We have developed a new motion planner for manipulating DLOs and tying knots (self-knots and knots around simple static objects) using cooperating robot arms. Using the input physical model of an DLO (see animations at the bottom), the planner constructs a topologically-biased probabilistic roadmap in the DLO's configuration space. Unlike in traditional motion planning problems, the goal is a topological state of the world, rather than a geometric one. The implemented planner has been tested in simulation to achieve various knots like bowline, neck-tie, bow (shoe-lace), and stun-sail. In real-life, the planner was used to tie a bowline using two PUMA 560 robots. Possible applications of our planner are robotized suturing in medical surgery and assembly of cable harnesses in automobile industries. |
|
We implemented our manipulation planner in C++ and ran
knot-tying simulation experiments on a 1.5GHz Intel Xeon PC with 1GB RAM.
The physical model of the DLO that we use takes into account the essential
mechanical properties of a typical DLO such as stretching, compressing,
bending and twisting, as well as the effect of gravity. It manages
self-collisions efficiently and also accounts for the interaction of the
DLO with other static and rigid objects in the environment.
The planner took 10-15 minutes of CPU time to generate
motions for the dual 6-DOF robots that tie common knots in simulation,
such as bowline, stunsail, shoe-lace, and neck-tie.
The robustness of our planner to inaccuracies in the physical
model of the rope
was further ascertained when the robots were able to tie bowline knots with the same plan,
but using four other ropes of different nature, i.e. ropes with different materials and thicknesses.
However, the same plan failed to tie the knot for a plastic rope,
because it was too stiff and the plan was originally generated for significantly less stiff ropes.
The table in the figure below (left) lists the materials and thicknesses of the ropes used.
The figure, in the right, below shows the final bowline shape attained by the ropes.
We have also been interested in quantifying the robustness of generated plans
to inaccuracies in the rope model. But it is not feasible to do so from real experiments
since rope manufacturers do not provide numerical values
for the mechanical properties of ropes.
So, we quantified the robustness of generated plans
from computer simulations in the following manner.
After generating a manipulation plan for tying a bowline using
a particular rope model, we tested in simulation if the same manipulation plan
still achieves a bowline after corrupting
the rope model parameters with Gaussian noises. The table in the figure below lists the means
and standard deviations (estimated numerically) for the Gaussian distributions from
which 3 main parameters of the model
were independently chosen, such that a bowline was achieved more than
90% of the time. The mean values correspond to the original model parameter values,
used to generate the manipulation plan.
The standard deviations and the corresponding mean values have comparable values,
indicating a high degree of robustness.

Figure: Means and standard deviations of Gaussian distributions from which the three main rope model parameters were chosen for the robustness analysis. |



Wang Fei's (NUS) elastic thread model |

Ankur Dhanik's surgical suture model |

Joel Brown's rope model |
|

|
|
|