Best of both worlds:
human-machine collaboration for object annotation
Abstract
The long-standing goal of localizing every object in
an image remains elusive. Manually annotating objects
is quite expensive despite crowd engineering innovations.
Current state-of-the-art automatic object detectors can accurately
detect at most a few objects per image. This paper
brings together the latest advancements in object detection
and in crowd engineering into a principled framework
for accurately and efficiently localizing objects in images.
The input to the system is an image to annotate and a set
of annotation constraints: desired precision, utility and/or
human cost of the labeling. The output is a set of object
annotations, informed by human feedback and computer vision.
Our model seamlessly integrates multiple computer
vision models with multiple sources of human input in a
Markov Decision Process. We empirically validate the effectiveness
of our human-in-the-loop labeling approach on
the ILSVRC2014 object detection dataset.
Citation
@inproceedings{RussakovskyCVPR15,
author = {Olga Russakovsky and Li-Jia Li and Li Fei-Fei},
title = {Best of both worlds: human-machine collaboration for object annotation},
booktitle = {CVPR},
year = {2015}
}
Links
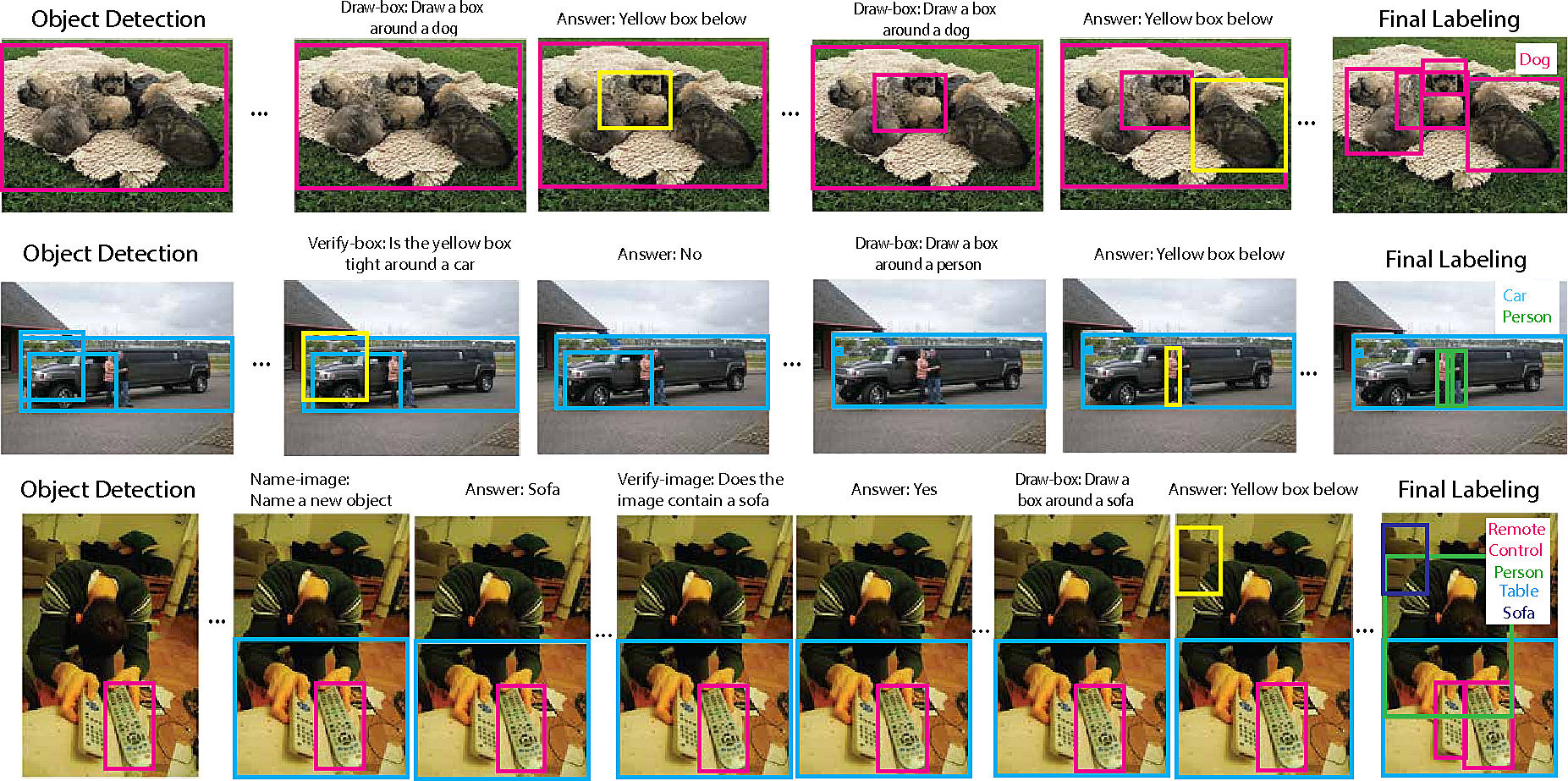
Qualitative results