 | Education | Research | Awards | Teaching | Contact | Life |
| Education | Research | Awards | Teaching | Contact | Life |
Greetings! I am a PhD student (currently on leave) at the Stanford AI Lab(SAIL). My advisor is Prof. Andrew Ng. I have been working on machine learning and robotics research since I joined Stanford in September 2009. I worked on miniature-size autonomous helicopters during my undergraduate at National Univerisy of Singapore.

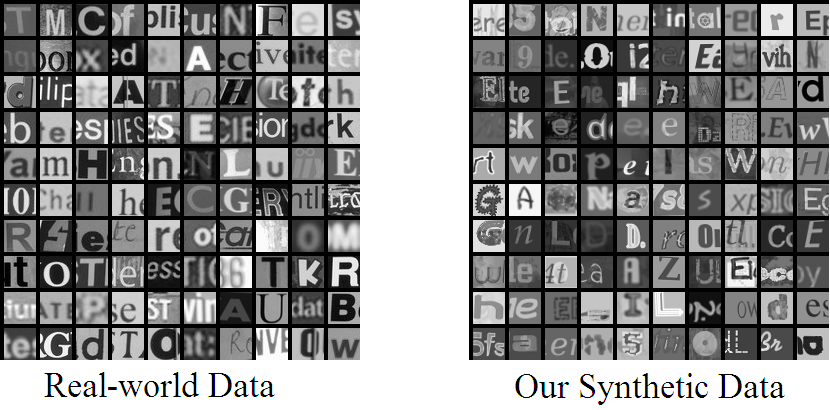
Reading text from photographs is a challenging problem with wide range of potential applications. Many recent methods have been proposed to design an end-to-end scene text recognition systems. Most of them are based on hand-crafted features and cleverly engineered algorithms. Our approch is to design machine learning-specifically, large-scale algorithms for learning the features automatically from unlabeled data, and construct highly effective classifiers for both detection and recognition to be used in a high accuracy end-to-end system. In order to gather enough training data for our system, a simple procedure that generates high quality synthetic data is devised.(See example image on the right). We also created the SVHN Dataset as a new benchmark for housenumber recognition in natural scene images.

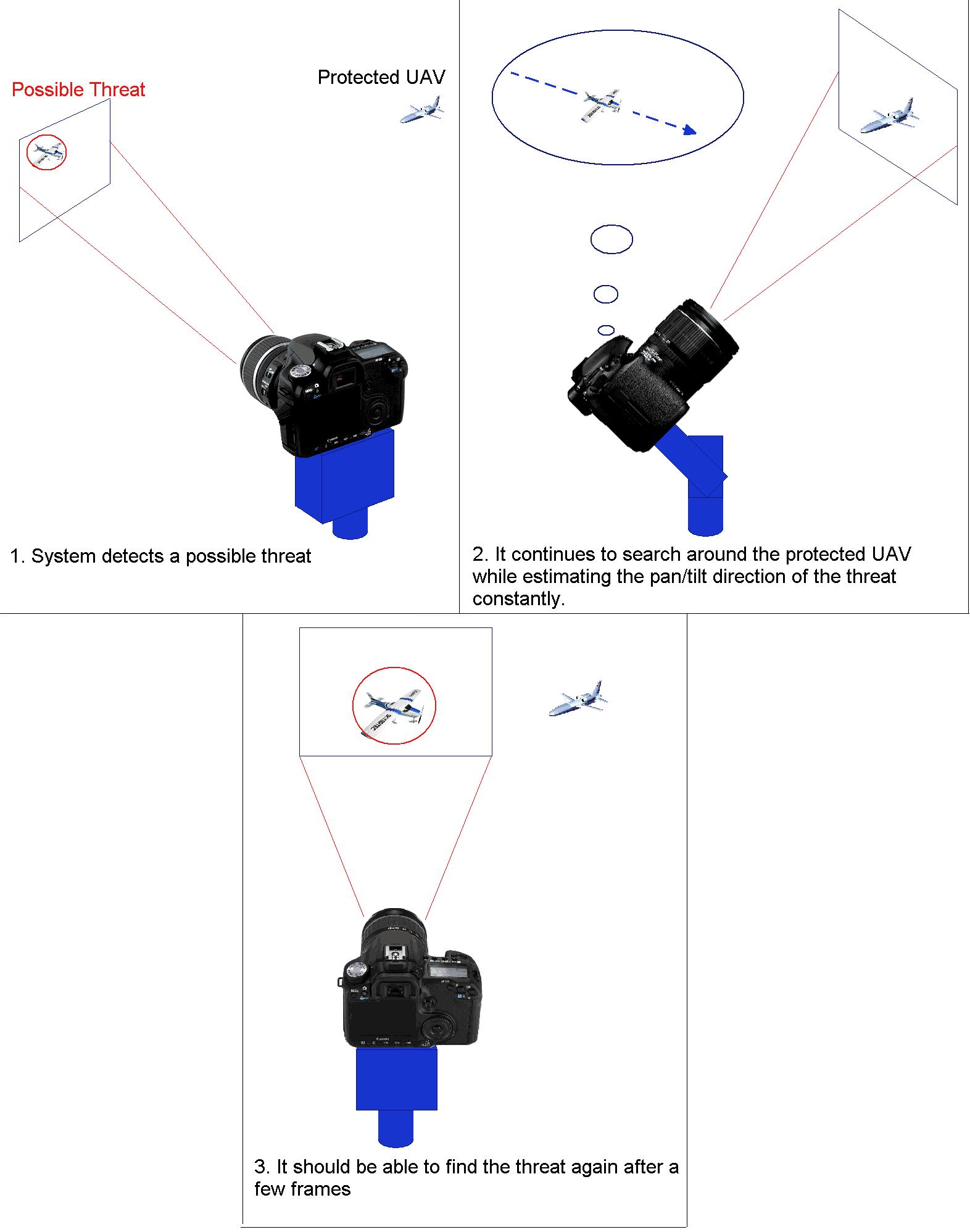
The project aims to build an automated system to replace the human observers that detects and tracks airplanes in the vicinity of the protected UAV so as to avoid potential collisions. A high resolution DSLR camera is mounted on a pan/tilt module to automatically search for airplanes miles away. Meanwhile, in order to track the airplanes in real time, an efficient heuristic based on corner detection is developed to spot airplanes quickly in the high resolution images captured by the camera. By estimating the velocity vector of detected aircrafts, the system is able to track multiple targets while keeping on searching for other nearby aircrafts. Field tests have shown that the system is able to detect and track airplanes effectively in real time. The system provides an inexpensive and feasible way to automate safety surveillance during UAV test flights. This work was presented at the SAE AeroTech Conference 2010.
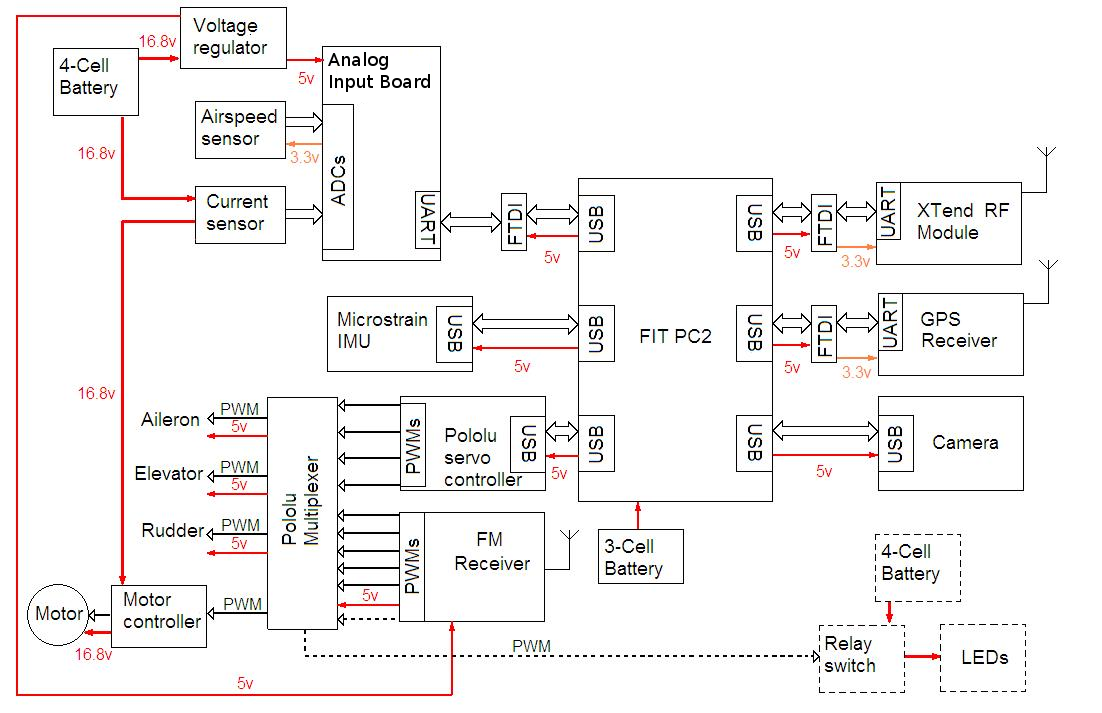

This work considers the task of accurate in-air localization for multiple unmanned or autonomous aerial vehicles flying in close formation. Two low-cost, electric powered, remote control trainer aircrafts with wing spans of approximately 2 meters are used. Our control software, running on an onboard x86 CPU, uses LQG control (an LQR controller coupled with an EKF state estimator) and a linearized state space model to control both aircraft to fly synchronized circles. In addition to its control system, the lead aircraft is outfitted with a known pattern of high-intensity LED lights. The trailing aircraft captures images of these LEDs with a camera and uses a recent computer vision algorithm to determine the relative position and orientation of the leading aircraft. The entire process is carried-out in real-time with both vehicles flying autonomously.

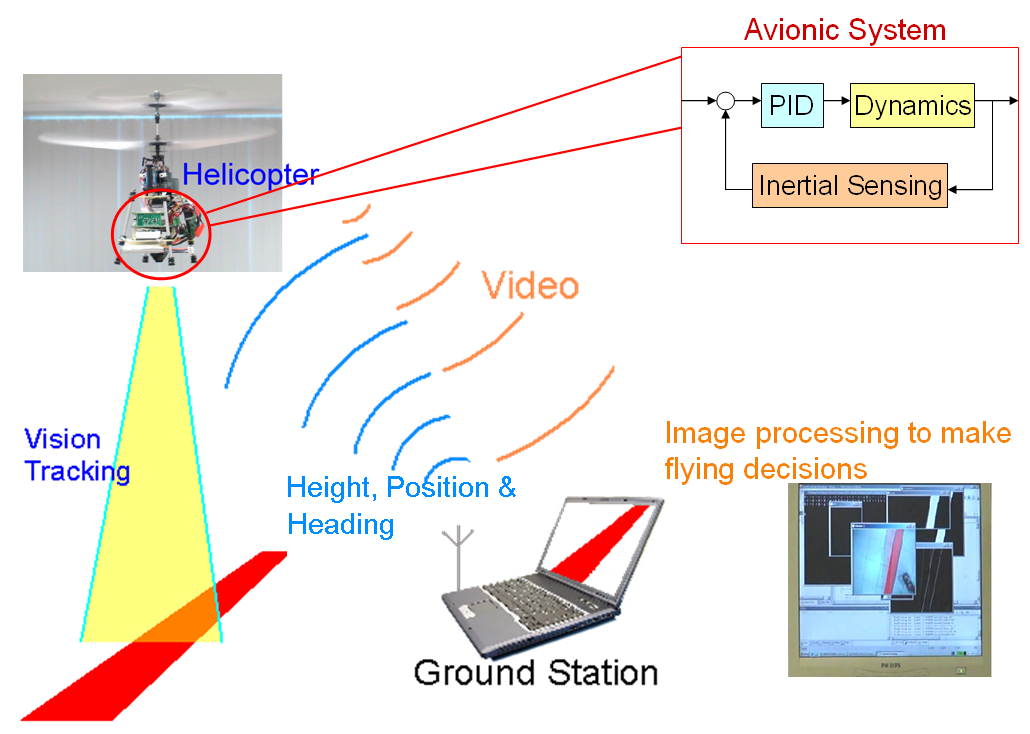
A micro autonomous helicopter system with miniature size is designed and constructed as a test platform for indoor flight control and navigation. We adapted a coaxial radio-controlled toy helicopter into an autonomous aerial vehicle. The avionic system is based on PID control, inertial sensing and computer vision.
Publications:
Oral presentation slides
code demo
toy character datasets (consisting of cropped characters from ICDAR 2003)
lineBboxes.tar (pre-computed line-level bounding boxes using our best detector)
Synthetic data (that we used to augment our training set. We also used the english subset of Chars74k dataset in our training set.)
2. Best Student Paper Award, ICDAR 2011
3. Best Student Paper Award, AIAA Infotech@Aerospace 2011
4. Siebel Scholarship 2011, by Siebel Scholars Foundation
5. IEEE Control Systems Chapter Prize (Best Control Engineering Final Year Project), National University of Singapore, 2009
6. Motorola Scholarship 2007 and Motorola Scholarship 2008, by Motorola Singapore
7. Micron Innovation Award 2007, by Micron Singapore
Address:
Room 114, Gates Computer Science
353 Serra Mall
Stanford, CA 94305