Research Areas |
 |
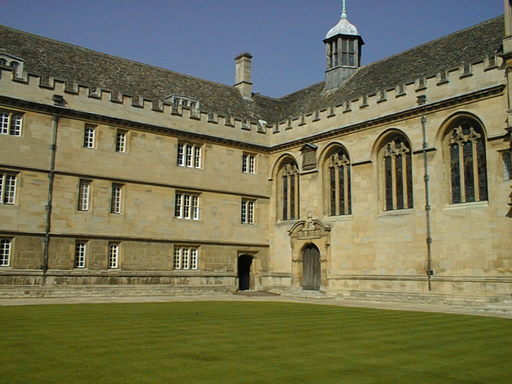
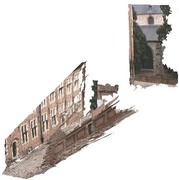
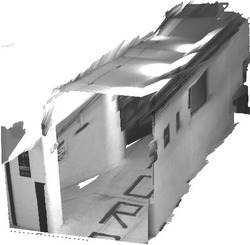
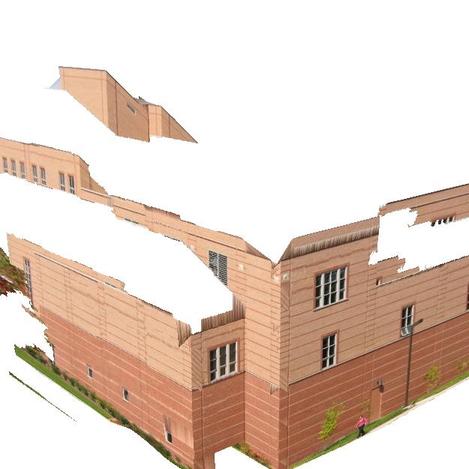
Dense 3D reconstruction from multiple wide baseline images of urban scenes
|
|
|
|
|
|
| |
SfM and dense 3D models from streetview sequences
|
|
 |
 |
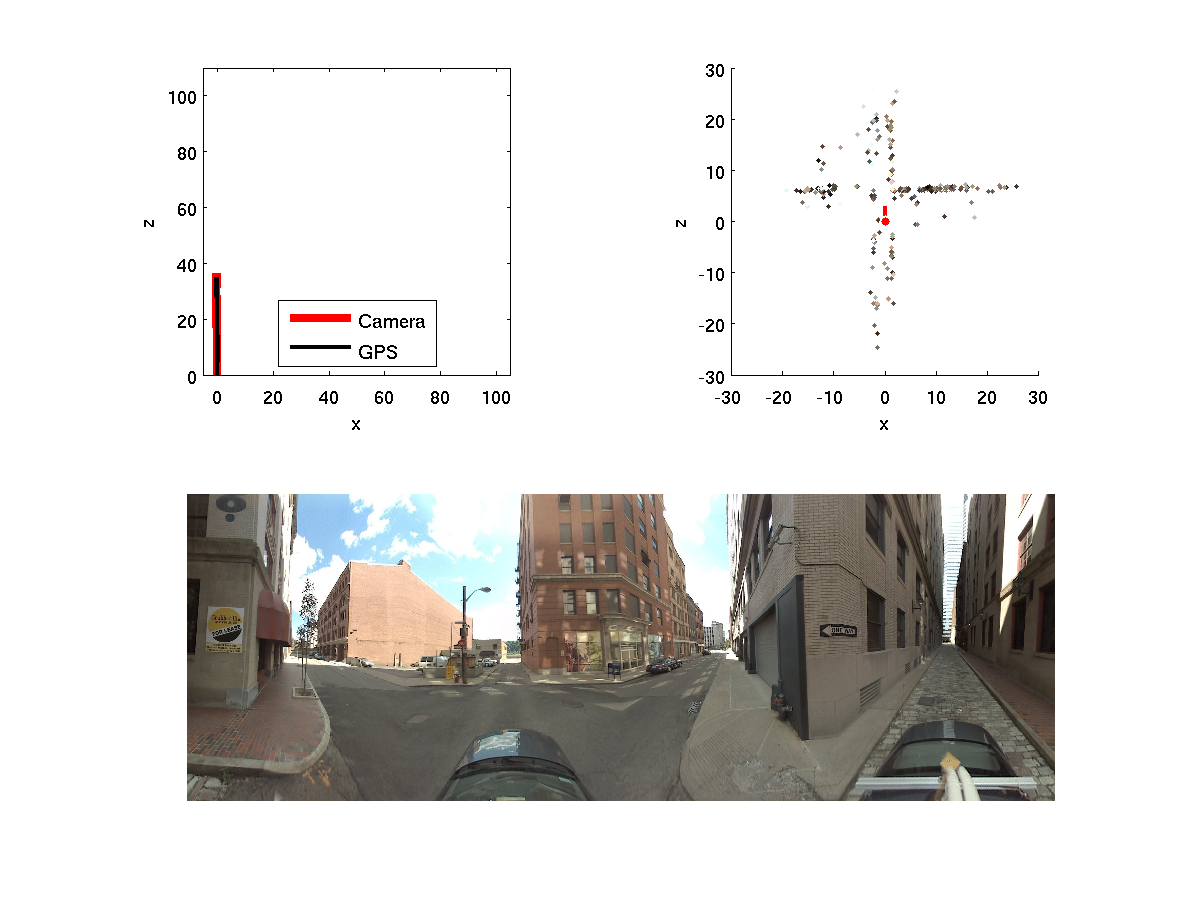 |
| Spherical Ladybug camera |
Mounted on a vehicle |
video
with trajectory estimate |
|
|
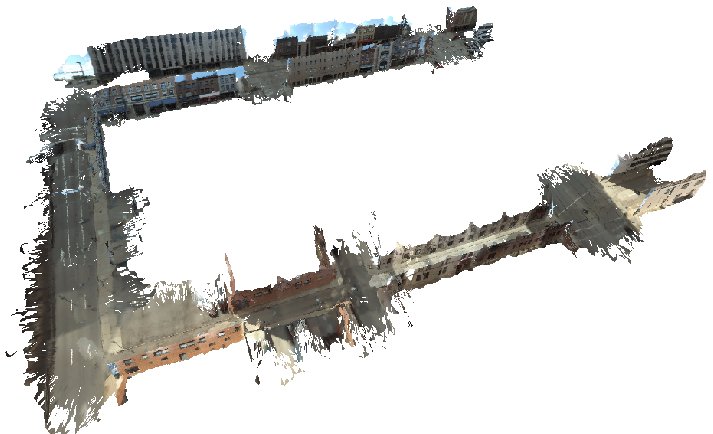 |
| 3D model fused from 200 panoramic images - video (DivX) |
|
|
|
| [ref] |
Micusik B., Kosecka J.: Piecewise Planar City 3D Modeling from Street View Panoramic
Sequences, IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Miami, USA, © 2009 IEEE [pdf] |
|
|
| |
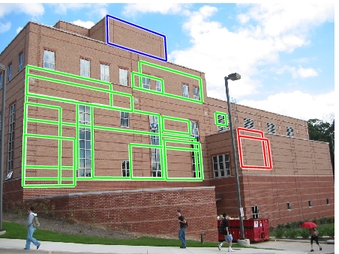
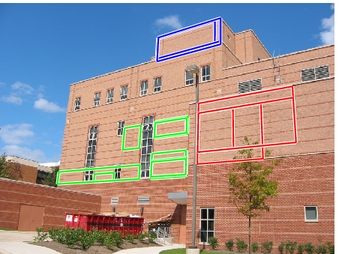
Detection and matching of rectilinear structures as projections of rectangles in man-made environments
|
|
 |
 |
 |
| Left image with rectangles after the refinement stage |
Right image with rectangles after the matching stage |
Top view on the 3D model built from matched rectangles |
|
|
| [ref] |
Micusik B., Wildenauer H. and Kosecka J..: Detection and Matching of Rectilinear Structures, IEEE Conference on Computer Vision and Pattern Recognition (CVPR), USA, 2008 |
|
|
| |
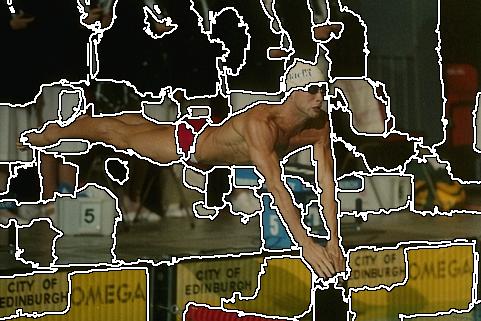
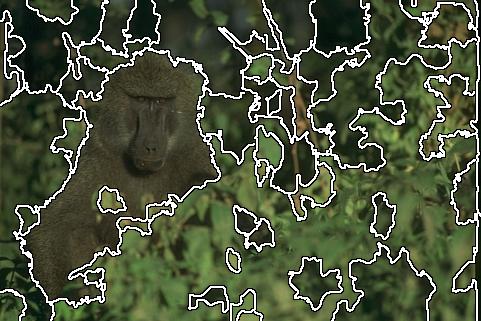
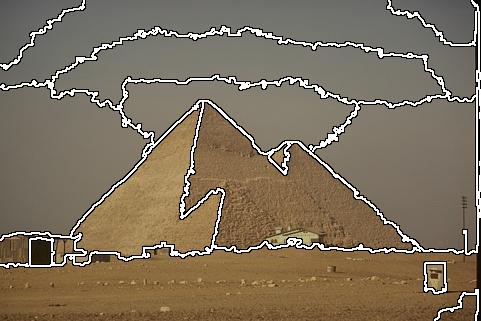
Automatic image segmentation handling texturness and colourness of images |
|
|
|
| [ref] |
Micusik B. and Pajdla T.: Multi-label Image Segmentation via Max-sum Solver, IEEE Conference on Computer Vision and Pattern Recognition (CVPR), USA, © 2007
IEEE, [pdf]
|
| [ref] |
Micusik B. and Hanbury A.: Automatic Image Segmentation by Positioning a Seed, European Conference on Computer Vision (ECCV), Austria, © 2006
Springer Verlag, [pdf]
|
|
|
| |
Omnidirectional camera calibration and structure from motion estimation through epipolar geometry. Click here. |
 |
|
[ref] |
Micusik B. and Pajdla T.: Structure from Motion with Wide Circular Field of View Cameras, IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), © 2006
IEEE,
[pdf] |
|
| |
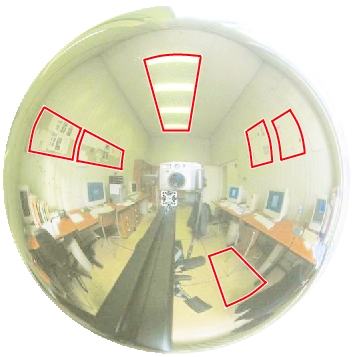
3D reconstruction from uncalibrated images taken by an omnidirectional camera with fisheye lens |
|
|
 |
 |
| one out of 11 images |
a camera with a fisheye lens |
|
|
[ref] |
Micusik B., Martinec D. and Pajdla T.: 3D Metric Reconstruction from
Uncalibrated Omnidirectional Images, Asian Conference on Computer Vision
(ACCV), Jeju Island, Korea, 2004 [pdf] |
|
| |
3D reconstruction from 2 uncalibrated images taken by a spherical catadioptric omnidirectional camera |
|
|
 |
 |
| left image |
right image |
|
|
|
[ref] |
Micusik B. and Pajdla T.: Autocalibration & 3D Reconstruction with
Non-central Catadioptric Cameras, IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Washington DC, USA, 2004, [pdf] |
|