Past Research
Information Theoretic Control of Mobile Sensors
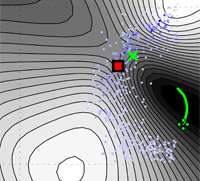
One step toward vehicle autonomy is to quantify the information content of observations arising from planned actions. I used a particle filter approach to incorporate observations, and information theory to interpret the particle set and sensor model. This allows us to use very descriptive belief distributions. Using new techniques to approximate mutual information, we demonstrated cooperative control of large fleets of aircraft. See publications for details or a more elaborate summary of information theoretic control.
STARMAC Autonomous Quadrotor Helicopters

Quadrotor helicopters are agile, mechanically simple aircraft. We developed the Stanford Testbed of Autonomous Rotorcraft for Multi-Agent Control (STARMAC), to form a multi-agent testbed for sensing and control algorithms in the Hybrid Systems Lab at Stanford University. View the summary movie for an overview. STARMAC I used a custom PIC control board, an Inertial Measurement Unit (IMU), GPS and ultrasonic ranging for sensing. In 2004, we demonstrated waypoint tracking outdoors, flew at speed, and flew multiple quadrotors. We then developed STARMAC II, with more thrust, an onboard computer, and more versatile sensors. It flies indoors and outdoors, with fast dynamic response, and can fly perceptive sensors. See our publications for details.
{kind=link}


Stanford Racing Team Autonomous Ground Vehicles
Stanford's entry to the DARPA Grand Challenge 2005 was Stanley, an autonomous Touareg without a driver. Stanley took 1st place, completing the 132 mile race in 6 hr, 53 min. I worked with Stanford's AI Lab, focusing on the dynamics and control of the vehicle. I developed the trajectory tracking controller that determined steering, braking and acceleration inputs to send Stanley where we wanted him to go, based on sensor inputs. Stanford's entry to the DARPA Urban Challenge was Junior, an autonomous Passat without a driver. Junior took 2nd place, driving 56 miles in 4 hr, 5 min of run time. Again, I worked on vehicle control. Stanley's reverse driving controller was first used in the race with Junior. See our publications for details or visit the Stanford Racing Team homepage.