|  |  |  |
| PROJECTS | PUBLICATIONS |
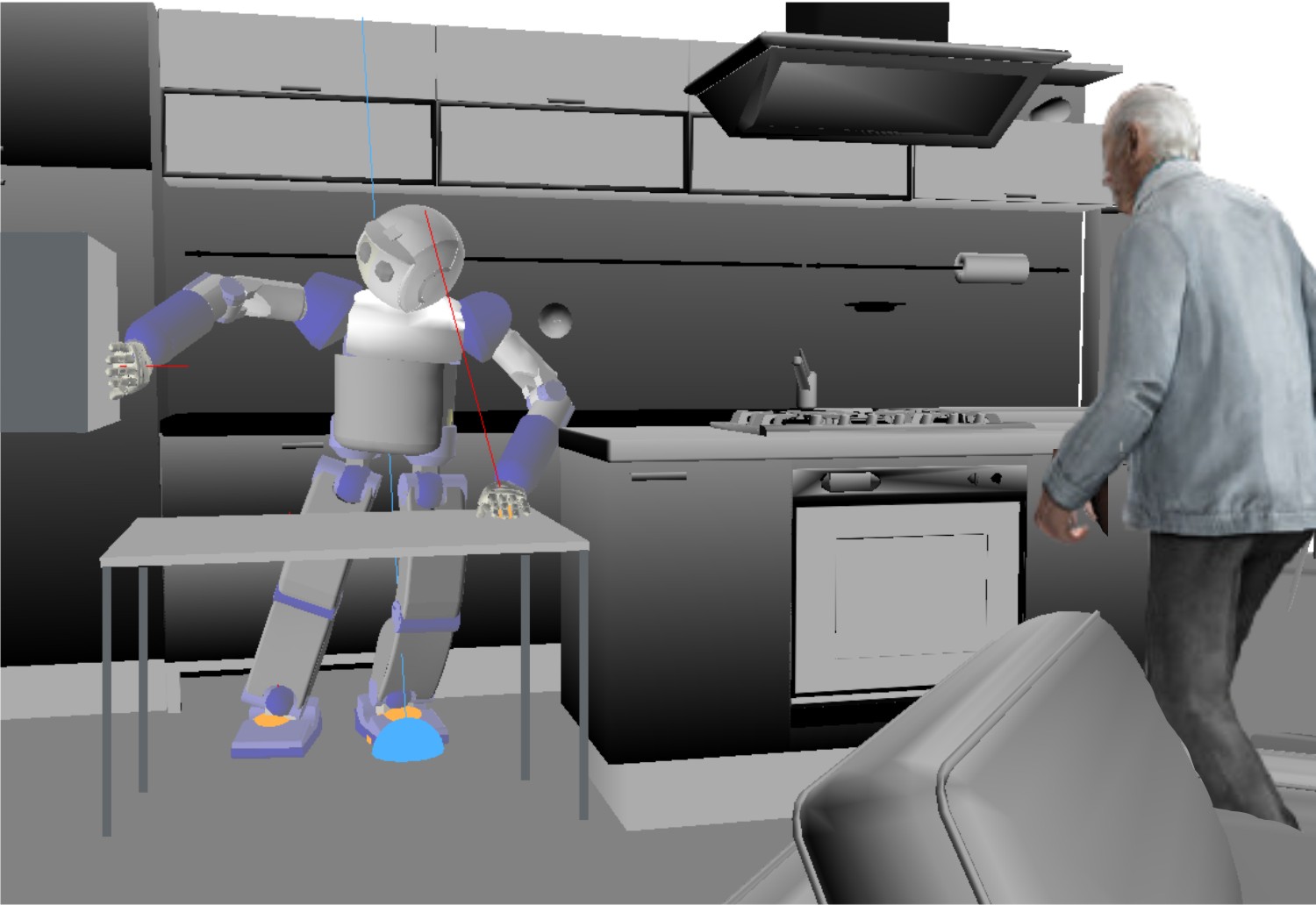
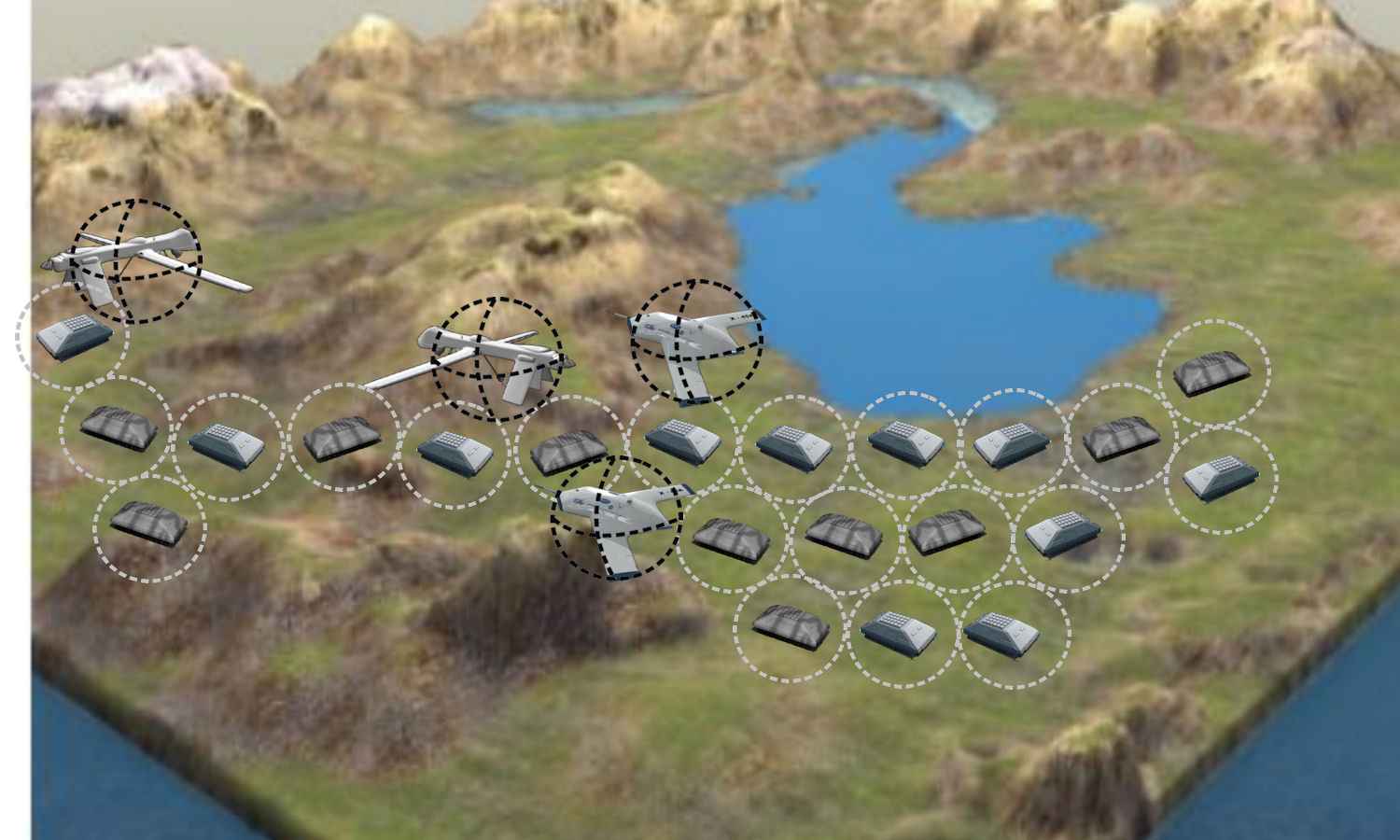
| Modeling and control of humanoid systems Humanoids are difficult systems to control because they need to coordinate many low-level behaviors to accomplish complex tasks while being responsive to the changing environment. [more] Multi-robot coordination and control In this area of research I address the coordination of large number of heterogeneous vehicles under network management and geographical constraints. [more] Analysis and assistance of human motor function In this area, I study multi-contact compliant control techniques and balance dynamics to generate motion patterns of subjects supporting their bodies with hands and feet. The aims is to generate motion and contact patterns for neuromuscular feedback needed to enable assisted postural stance and walk on the disabled. [more] | NEW Luis Sentis, Jaeheung Park, Oussama Khatib, Compliant Control of Multi-Contact and Center of Mass Behaviors in Humanoid Robots, IEEE Transactions on Robotics (TRO), Vol. 26(3), (2010), pp. 483-501.
NEW Luis Sentis, Chapter Title: Compliant Control of Whole-Body Multi-Contact Behaviors in Humanoid Robots, Book Name: Motion Planning for Humanoid Robots, Springer Global Editorial, Invited Book Chapter, 2009. Luis Sentis, Jaeheung Park, Oussama Khatib, Modeling and Control of Multi-Contact Centers of Pressure and Internal Forces in Humanoid Robots, IEEE International Conference on Intelligent Robots and Systems (IROS), St. Louis, 2009. Luis Sentis, Mike Mintz, Arun Ayyagari, Craig Battles, Susan Ying, Oussama Khatib, Large Scale Multi-Robot Coordination Under Network and Geographical Constraints, IEEE International Symposium of Industrial Electronics (ISIE-09), Seoul 2009. Roland Philippsen, Negin Nejati, Luis Sentis, Bridging the Gap Between Semantic Planning and Continuous Control for Mobile Manipulation Using a Graph-Based World Representation , The International Workshop on Hybrid Control of Autonomous Systems (HYCAS-09), Pasadena 2009. Oussama Khatib, Emel Demircan, Vincent DeSapio, Luis Sentis, Thor Besier, Scott Delp, Robotics-based Synthesis of Human Motion, Journal of Biomechanics. Emel Demircan, Luis Sentis, Vincent De Sapio, and Oussama Khatib, Human motion reconstruction by direct control of marker trajectories, Advances in Robot Kinematics (ARK), Springer, 11th International Symposium, Batz-sur-Mer, France, June 2008. Oussama Khatib, Luis Sentis, and Jae-Heung Park, A Unified Framework for Whole-Body Humanoid Robot Control With Multiple Constraints and Contacts, Springer Tracts in Advanced Robotics - STAR Series, European Robotics Symposium (EURON), Prague, Czech Republic, March 2008. Luis Sentis, Synthesis and Control of Whole-Body Behaviors in Humanoid Systems, Ph.D. Thesis, Stanford University, July 2007, (7.4 MB). Luis Sentis and Oussama Khatib, A Whole-Body Control Framework for Humanoids Operating in Human Environments, Proceedings of the IEEE Internactional Conference in Robotics and Automation, Orlando, USA, May 2006. Luis Sentis and Oussama Khatib, Synthesis of whole-body behaviors through hierarchical control of behavioral primitives, International Journal of Humanoid Robotics, 2(4):505-518, December 2005. Luis Sentis and Oussama Khatib, Task-Oriented Control of Humanoid Robots Through Prioritization, IEEE-RAS/RSJ International Conference on Humanoid Robots, Santa Monica, USA, November 2004. Oussama Khatib, Oliver Brock, K.C. Chang, Diego Ruspini, Luis Sentis, Sriram Viji, Robots for the Human and Interactive Simulations, Proceedings of the 11th World Congress in Mechanism and Machine Science, Tianjin, China, 2003. Oussama Khatib, Oliver Brock, Kyong-Sok Chang, Diego Ruspini, Luis Sentis, and Sriram Viji, Human-Centered Robotics and Interactive Haptic Simulation, Robotics Research, The Tenth International Symposiun (ISRR'2001), Lorne, Victoria, Australia, November 2001, Springer-Verlag, 2002. Oussama Khatib, Oliver Brock, Kyong-Sok Chang, Francois Conti, Diego Ruspini, and Luis Sentis. Robotics and Interactive Simulation, Communications of the ACM 45(3): 46-51, March 2002. Santiago Silvestre, Luis Sentis, and Luis Castaner, A Fast Low-Cost Solar Cell Spectral Response Measurement System with Accuracy Indicator, IEEE Transactions on Instrumentation and Measurement, 48(5): 944-948, October 1999 |