![]()
The Conference on Robot Learning (CoRL) 2020 is being hosted virtually from November 16th - November 18th. We’re excited to share all the work from SAIL that’s being presented, and you’ll find links to papers, videos and blogs below. Feel free to reach out to the contact authors directly to learn more about the work that’s happening at Stanford!
List of Accepted Papers
Learning 3D Dynamic Scene Representations for Robot Manipulation
Contact: jiajunwu@cs.stanford.edu
Links: Paper | Video | Website
Keywords: scene representations, 3d perception, robot manipulation
Learning Latent Representations to Influence Multi-Agent Interaction
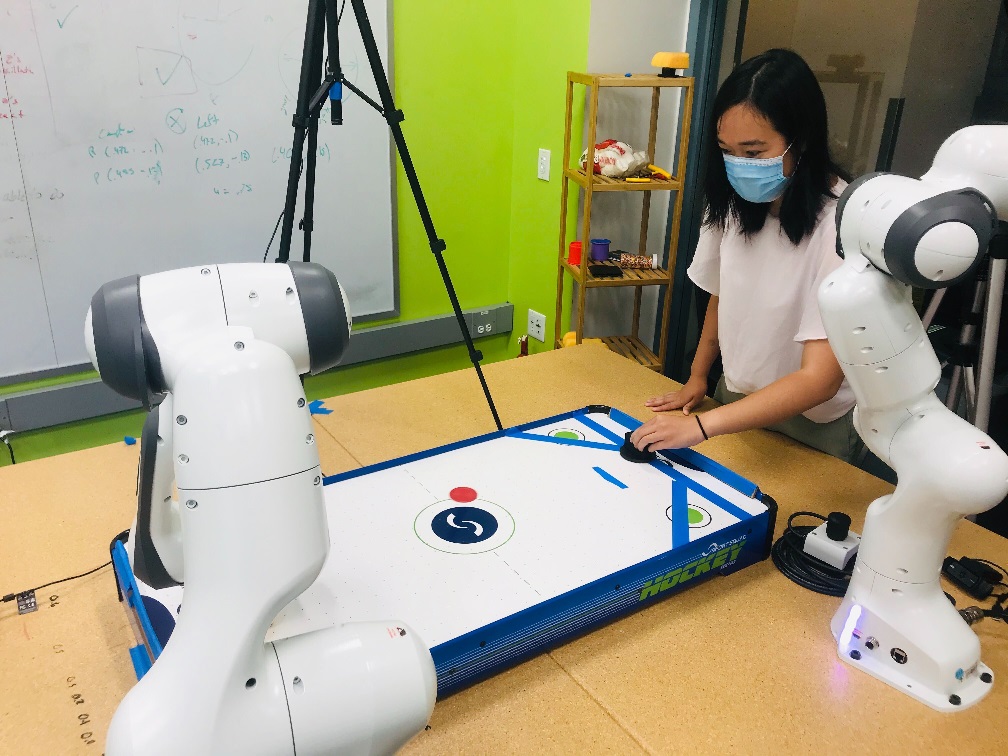
Contact: anniexie@stanford.edu
Links: Paper | Blog Post | Website
Keywords: multi-agent systems, human-robot interaction, reinforcement learning
Learning Object-conditioned Exploration using Distributed Soft Actor Critic
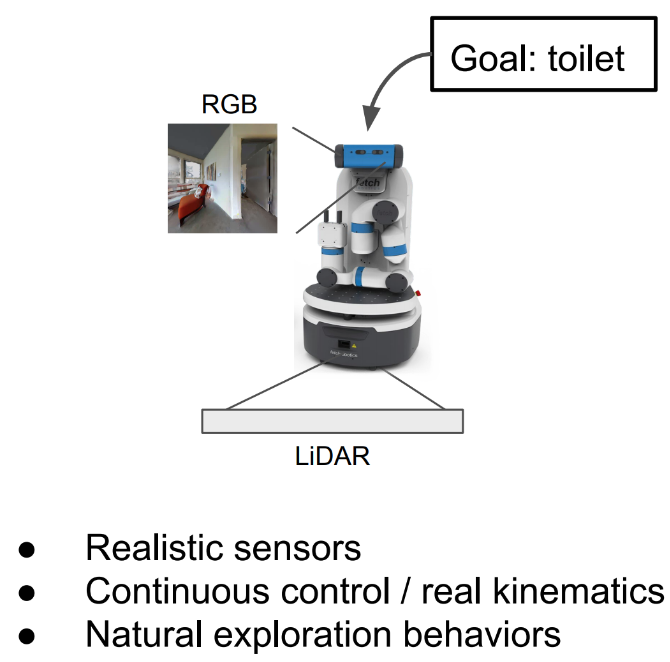
Contact: ayzaan@google.com
Links: Paper
Keywords: object navigation, visual navigation
MATS: An Interpretable Trajectory Forecasting Representation for Planning and Control
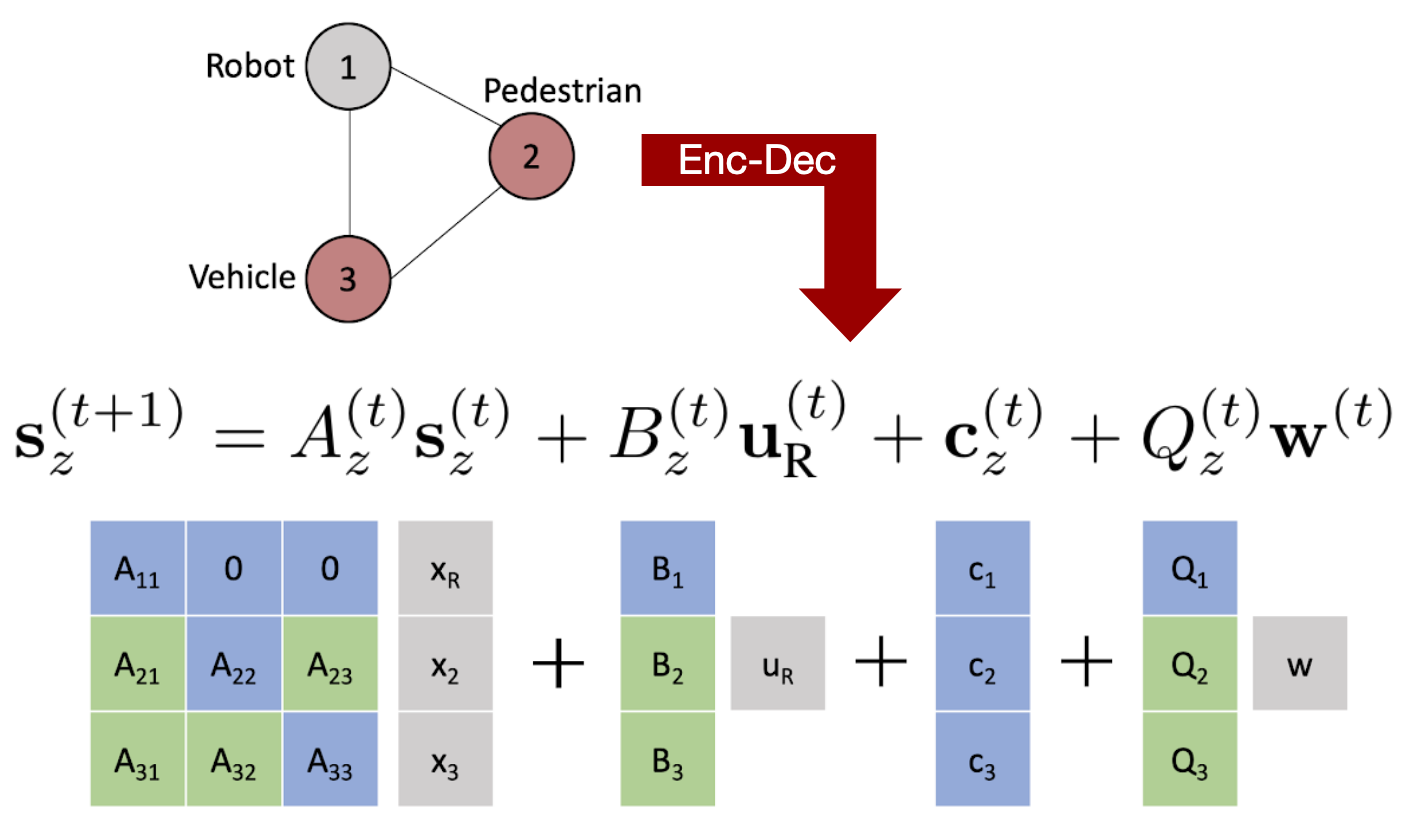
Contact: borisi@stanford.edu
Links: Paper | Video
Keywords: trajectory forecasting, learning dynamical systems, motion planning, autonomous vehicles
Model-based Reinforcement Learning for Decentralized Multiagent Rendezvous

Contact: rewang@stanford.edu
Links: Paper | Video | Website
Keywords: multiagent systems; model-based reinforcement learning
Reinforcement Learning with Videos: Combining Offline Observations with Interaction
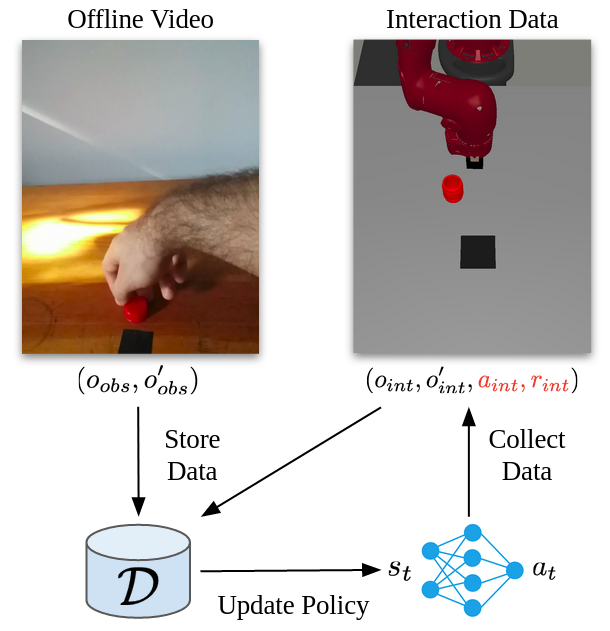
Contact: karls@seas.upenn.edu
Links: Paper | Website
Keywords: reinforcement learning, learning from observation
Sampling-based Reachability Analysis: A Random Set Theory Approach with Adversarial Sampling
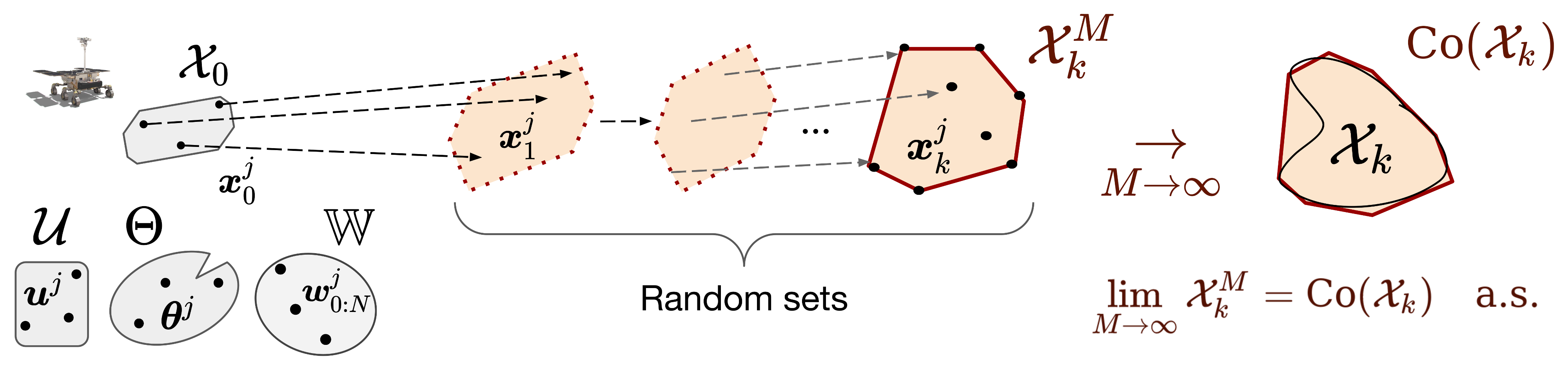
Contact: thomas.lew@stanford.edu
Links: Paper
Keywords: reachability analysis, robust planning and control, neural networks
Keynote
Walking the Boundary of Learning and Interaction (Dorsa Sadigh)

Overview: There have been significant advances in the field of robot learning in the past decade. However, many challenges still remain when considering how robot learning can advance interactive agents such as robots that collaborate with humans. This includes autonomous vehicles that interact with human-driven vehicles or pedestrians, service robots collaborating with their users at homes over short or long periods of time, or assistive robots helping patients with disabilities. This introduces an opportunity for developing new robot learning algorithms that can help advance interactive autonomy.
In this talk, I will discuss a formalism for human-robot interaction built upon ideas from representation learning. Specifically, I will first discuss the notion of latent strategies— low dimensional representations sufficient for capturing non-stationary interactions. I will then talk about the challenges of learning such representations when interacting with humans, and how we can develop data-efficient techniques that enable actively learning computational models of human behavior from demonstrations, preferences, or physical corrections. Finally, I will introduce an intuitive controlling paradigm that enables seamless collaboration based on learned representations, and further discuss how that can be used for further influencing humans.
Live Event: November 17th, 7:00AM - 7:45AM PST
We look forward to seeing you at CoRL!