![]()
The Robotics: Science and Systems conference (RSS 2022) is taking place June 27th - July 1st, and the International Conference on Robotics and Automation (ICRA 2022) also took place just recently. We’re excited to share all the work from SAIL that’s being presented, and you’ll find links to papers, videos and blogs below. Feel free to reach out to the contact authors directly to learn more about the work that’s happening at Stanford!
List of Accepted Papers (ICRA)
ReachBot: A Small Robot with Exceptional Reach for Rough Terrain
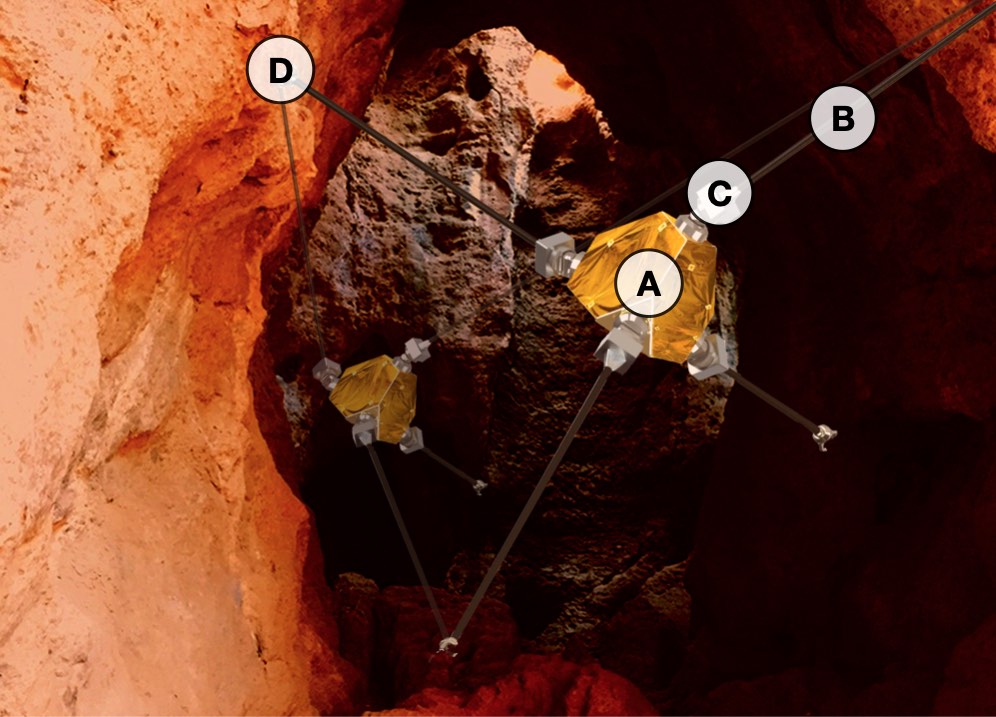
Contact: snewdick@stanford.edu
Keywords: mobile manipulation, space robotics and automation, climbing robots, grippers and other end-effectors, mechanism design
Balancing Efficiency and Comfort in Robot-Assisted Bite Transfer
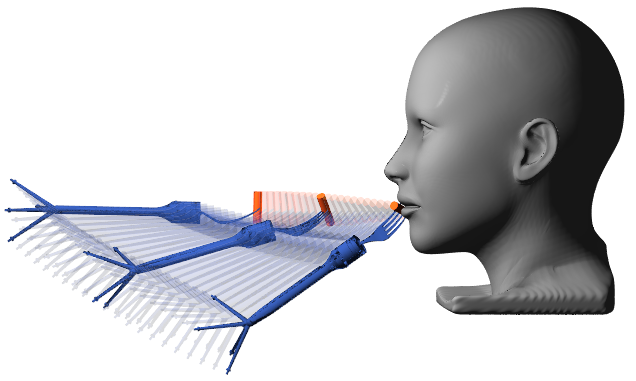
Contact: belkhale@stanford.edu
Links: Paper | Website
Keywords: motion planning, human robot interaction, assistive feeding
Grounding Predicates through Actions
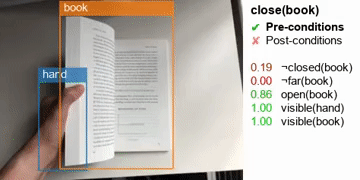
Contact: takatoki@cs.stanford.edu
Links: Paper | Website
Keywords: perception for manipulation, visual relationship detection, task planning
Grouptron: Dynamic Multi-Scale Graph Convolutional Networks for Group-Aware Dense Crowd Trajectory Forecasting
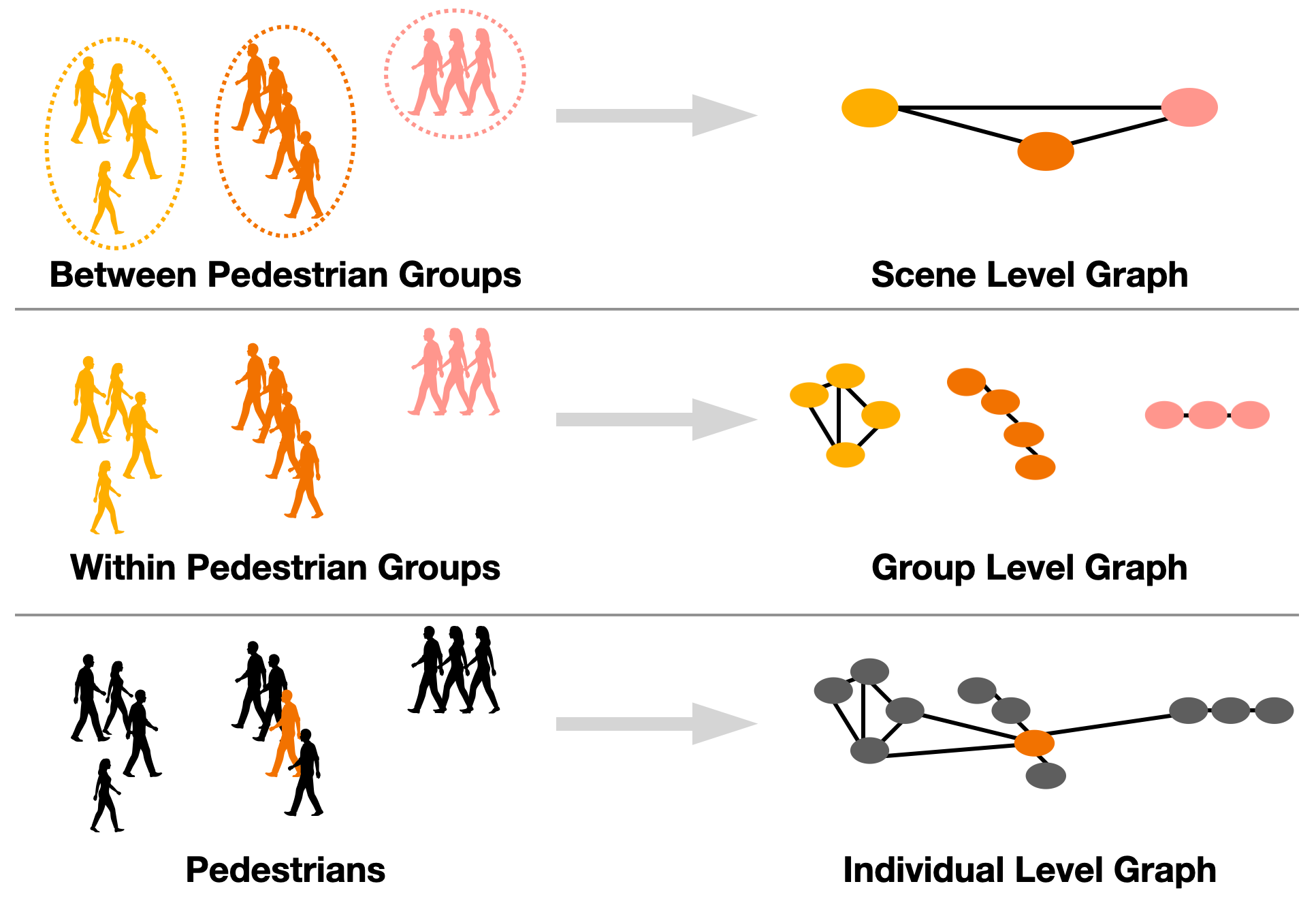
Contact: jiachen_li@stanford.edu
Links: Paper
Keywords: trajectory prediction, graph neural network, interaction modeling, human behaviors
Important Object Identification with Semi-Supervised Learning for Autonomous Driving
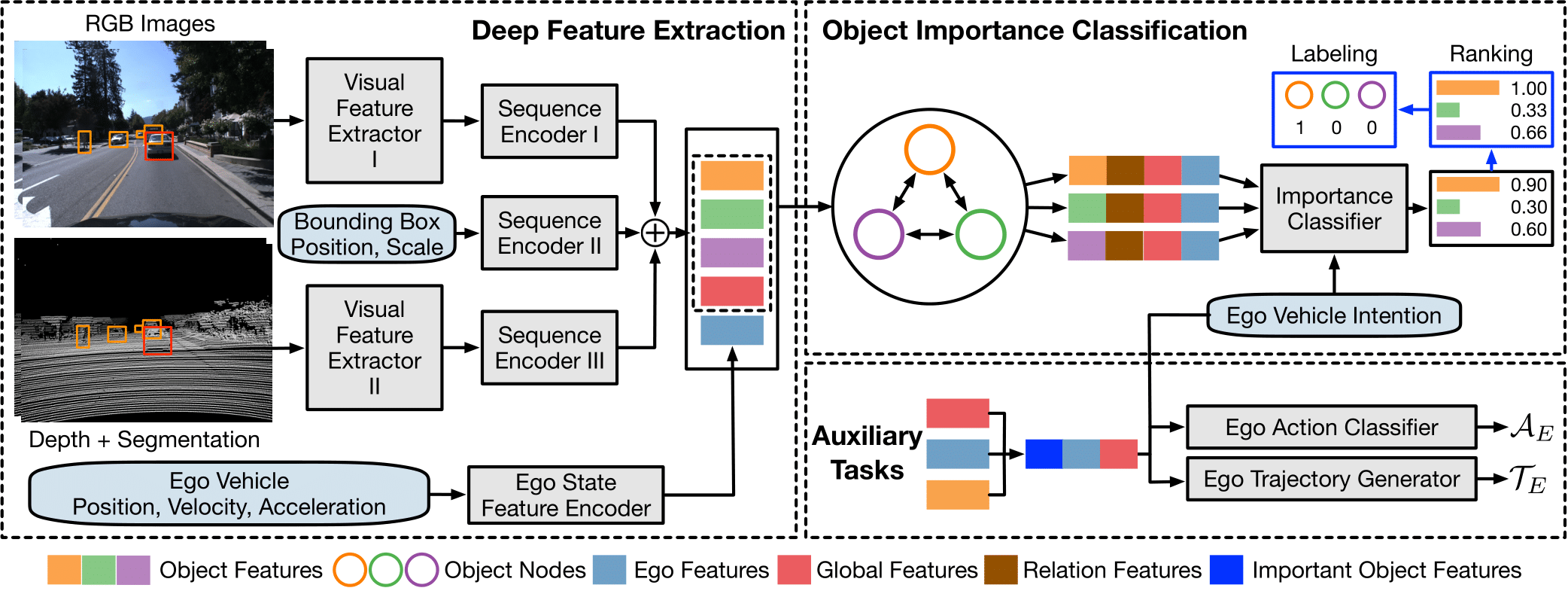
Contact: jiachen_li@stanford.edu
Links: Paper
Keywords: autonomous driving, scene understanding, relational reasoning, graph neural network
Learning Periodic Tasks from Human Demonstrations
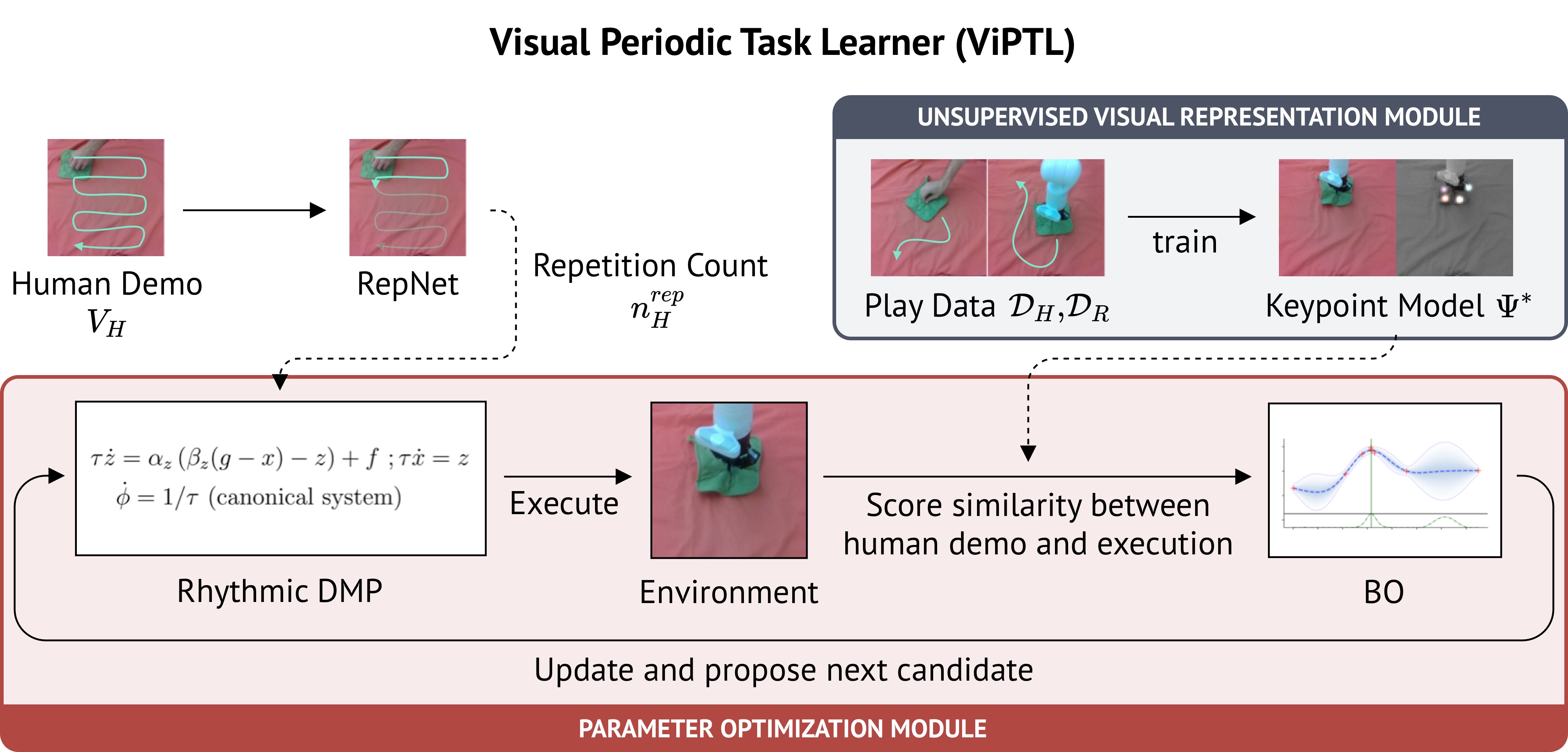
Contact: jingyuny@stanford.edu
Links: Paper | Website
Keywords: visual learning, learning from demonstration, perception for grasping and manipulation
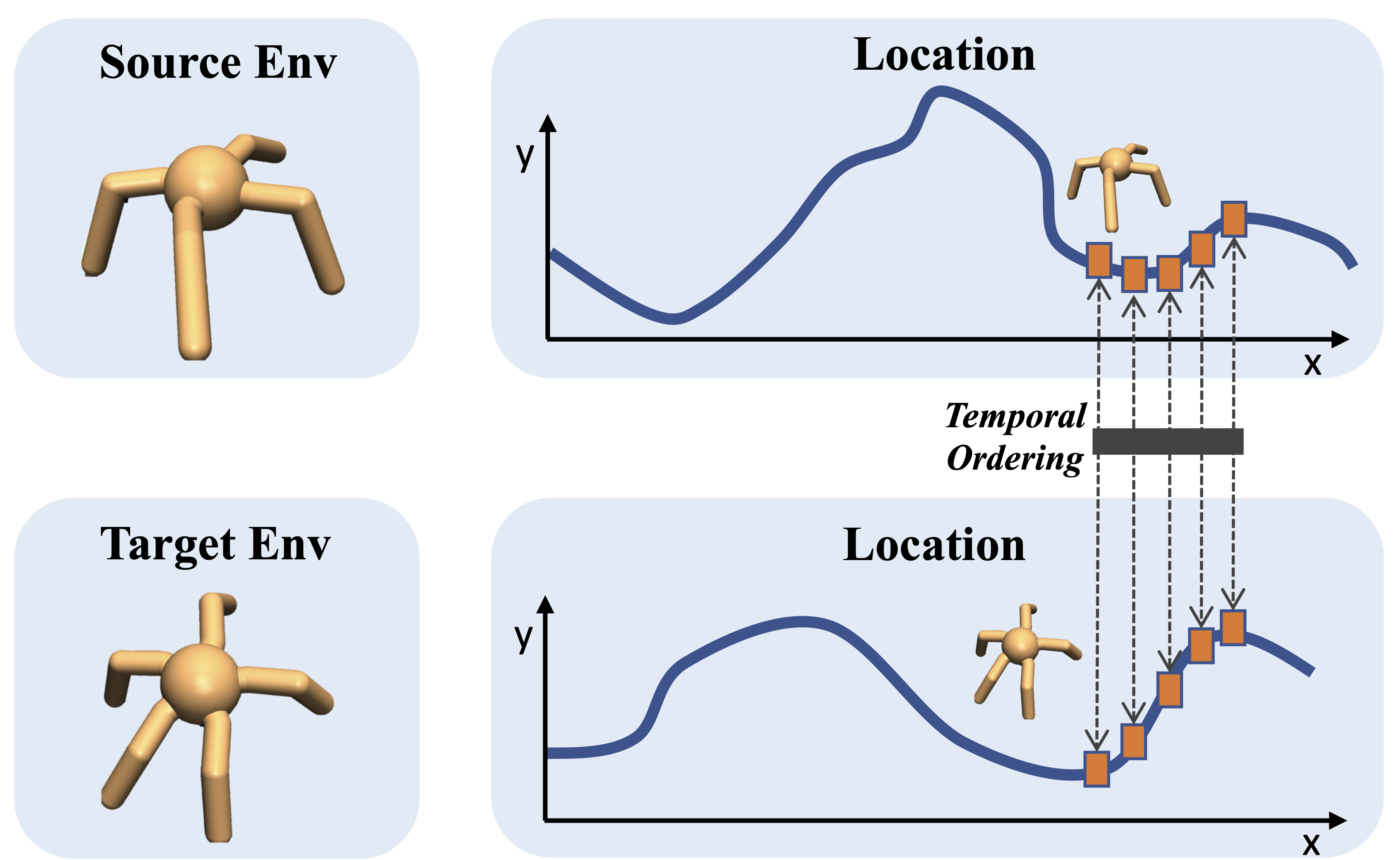
Learning from Imperfect Demonstrations via Adversarial Confidence Transfer
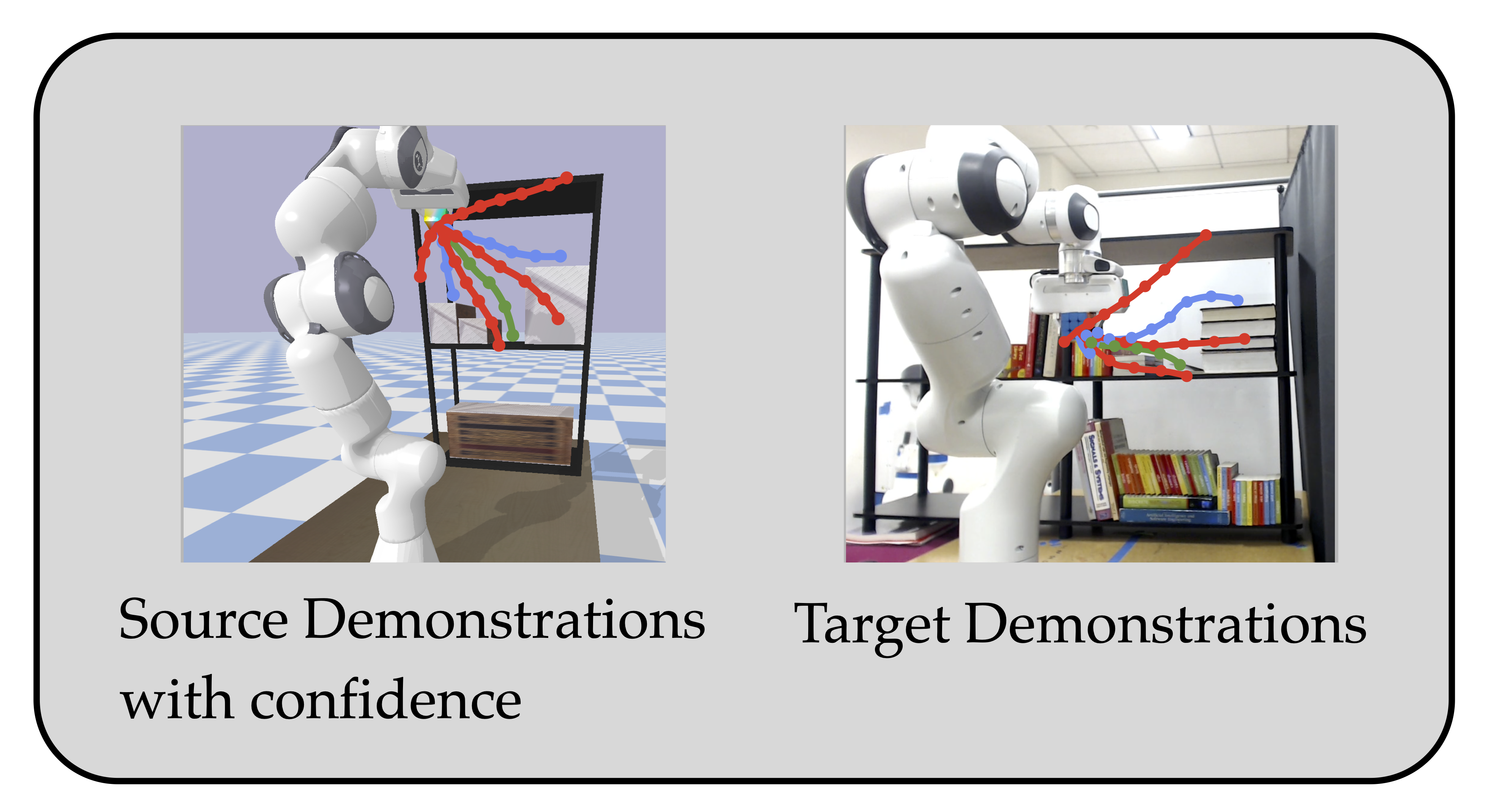
Contact: caozj@cs.stanford.edu
Links: Paper | Video | Website
Keywords: robotics, machine learning
Propagating State Uncertainty Through Trajectory Forecasting
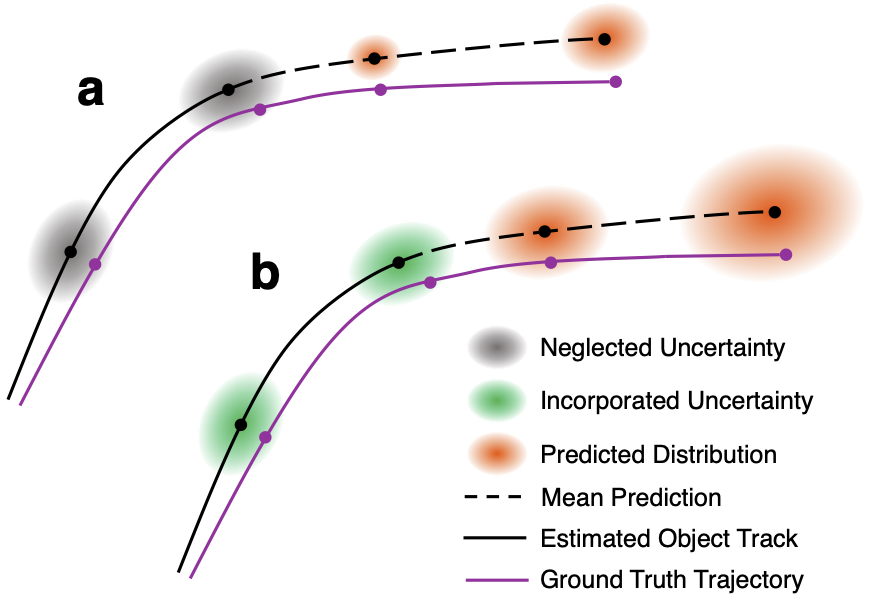
Contact: borisi@stanford.edu
Links: Paper
Keywords: uncertainty propagation, trajectory forecasting, autonomous vehicle perception
Symbolic State Estimation with Predicates for Contact-Rich Manipulation Tasks
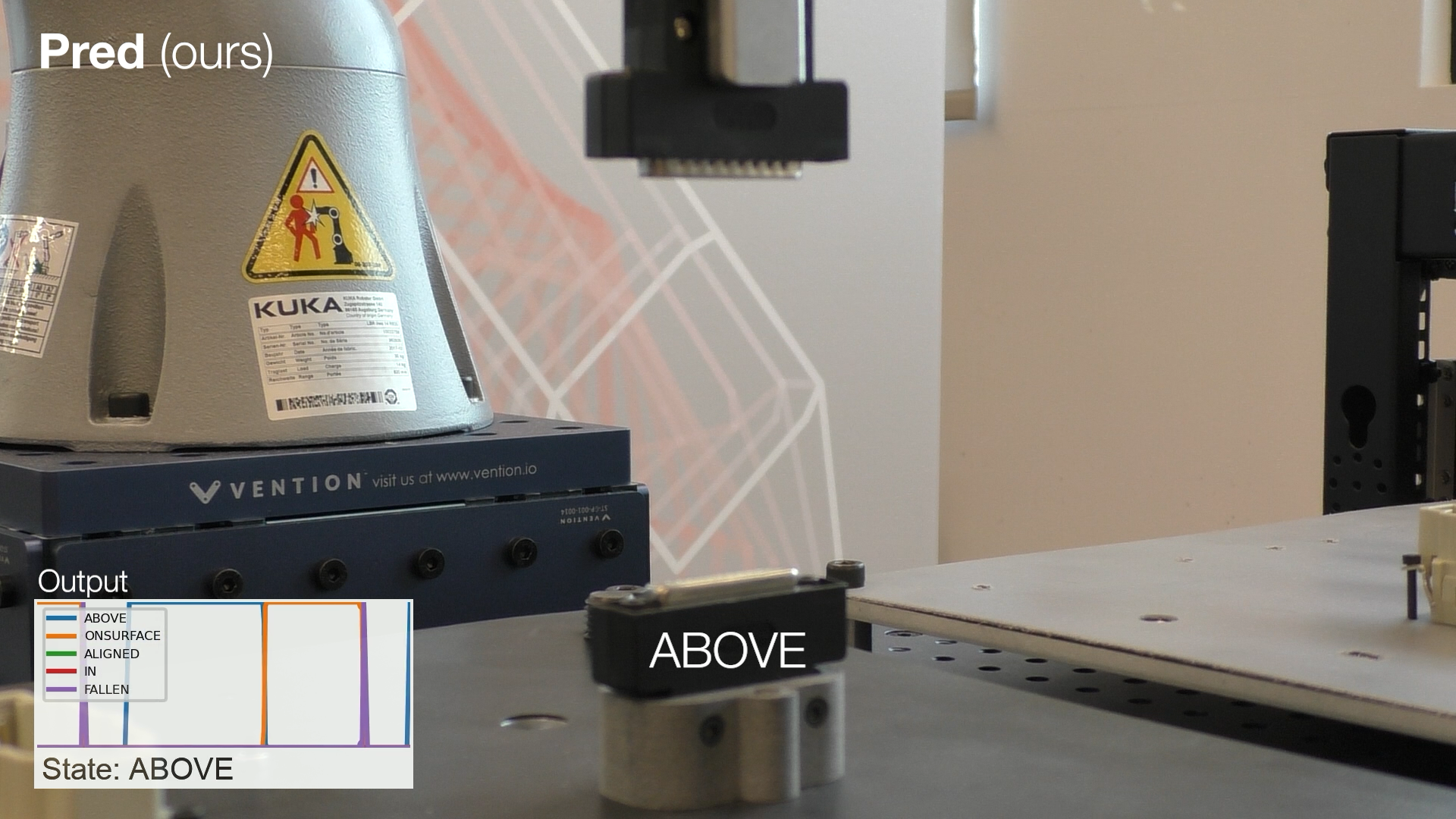
Contact: takatoki@cs.stanford.edu
Links: Paper | Website
Keywords: perception for manipulation, symbolic state estimation
Vision-Only Robot Navigation in a Neural Radiance World

Contact: chengine@stanford.edu
Links: Paper | Video | Website
Keywords: neural radiance fields, nerfs, vision-only navigation
Weakly Supervised Correspondence Learning
Contact: wangzih@stanford.edu
Links: Paper | Video | Website
Keywords: robotics, machine learning
List of Accepted Papers (RSS)
ACID: Action-Conditional Implicit Visual Dynamics for Deformable Object Manipulation
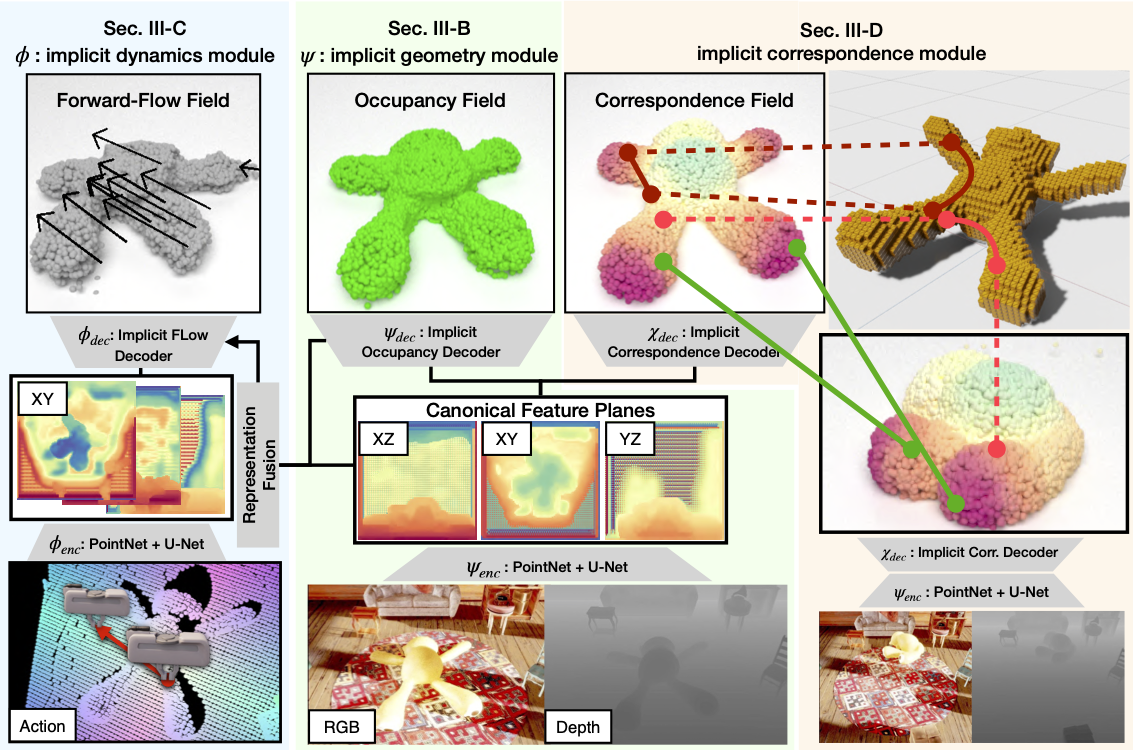
Contact: willshen@stanford.edu
Award nominations: Best Student Paper Nomination
Links: Paper | Video | Website
Keywords: deformable manipulation, implicit representations, simulation
Play it by Ear: Learning Skills amidst Occlusion through Audio-Visual Imitation Learning
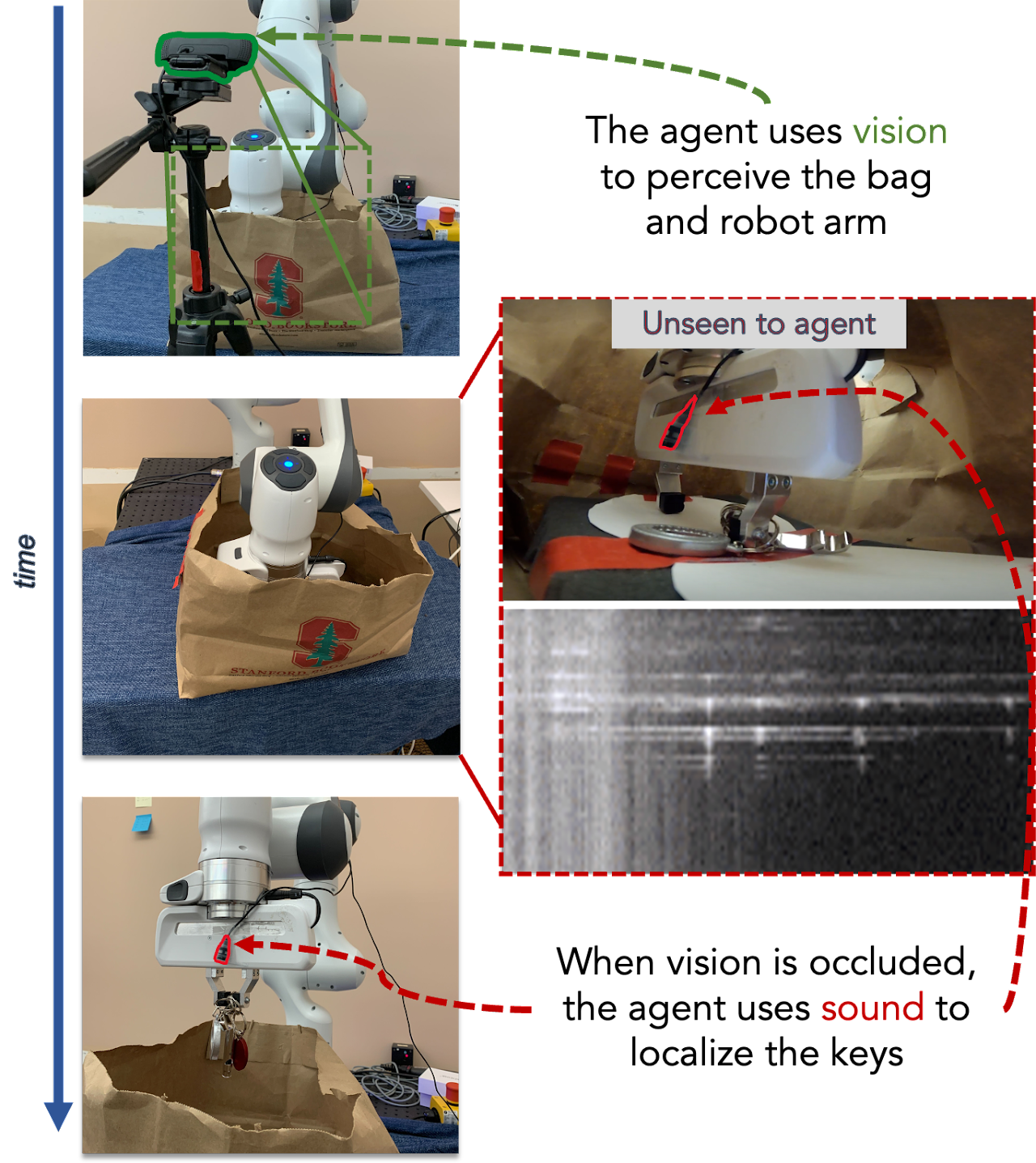
Contact: surajn@stanford.edu
Links: Paper | Video | Website
Keywords: multi-modal learning, robotic manipulation
We look forward to seeing you at the robotics conferences!