Today's models no longer fit the mold of autoregressive token generation, but the systems supporting LLM inference have not kept up. These models have composite architectures best captured by dataflow graphs. Requests are just walks on these graphs. M* is designed to fit this paradigm and maximize flexibility and performance for current and future composite models. In our tests, M* achieves nearly 2.7x higher throughput vs. vLLM-Omni and 4x higher throughput vs. SGLang-Omni while maintaining a lower RTF than both on Qwen3-Omni TTS workload.
Inference is no longer a single loop
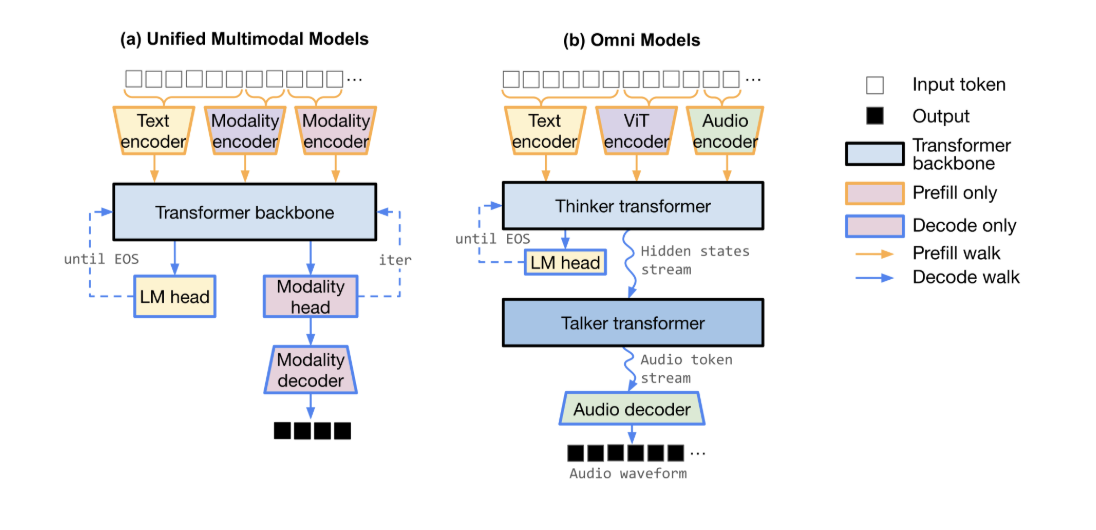
LLM serving systems like vLLM and SGLang are built on one assumption: that inference is a single autoregressive loop — prefill the prompt, then decode one token at a time until the model stops. The newest multimodal models break that assumption. UMMs (BAGEL), SpeechLMs (Orpheus), Omni models (Qwen3-Omni), VLAs (π0.5), and world models (V-JEPA 2) are composite: built from structurally distinct components — vision encoders, transformer backbones, diffusion and flow heads, audio codecs, action and world-model predictors — wired together in patterns that change with the input. They add non-AR loops (diffusion image generation, variable-horizon world-model rollouts), internal parallelism (the branches of classifier-free guidance; the pipelined Thinker–Talker of an omni model), and input-dependent paths (in BAGEL, generating an image and understanding one traverse different components of the same model).
M* serves all of them from a single runtime. On the models we have benchmarked, M* matches or beats the specialized system built for each — by up to 2.7× on speech and image serving, and 12.5× on world-model rollouts. The rest of this post shows how M* works, starting with code.
vit_encoder, vae_encoder, an LLM backbone, vae_decoder) and Qwen3-Omni (an omni model: Thinker, Talker, Code2Wav). Structurally diverse; each is naturally a graph.
Why today's serving stacks fall short
Composite models pose three challenges at once: architectural diversity (many paths, non-AR loops), performant modularity (HuggingFace Transformers is flexible but slow; vLLM and VoxServe are fast but domain-locked), and physical topology (heterogeneous components want different placement, batching, and transport).
vLLM and SGLang are superb at autoregressive text, but they are modality-locked: built for text generation, with image (and even text) inputs supported only as prefill-time encoder add-ons, and a single decode loop whose output is always text. There is no first-class way to compose heterogeneous components into loops and parallel branches — no CFG fan-out — and no cross-component streaming. vLLM-Omni and SGLang-Omni go further, modeling a request as a flat pipeline of stages wired by explicit data-transfer functions — enough for a Thinker–Talker–codec chain. But iteration stays inside a single stage and stages cannot be composed in parallel, so patterns such as diffusion loops or classifier-free guidance (CFG) fan-out must be added per-model as glue code. In vLLM-Omni, for instance, BAGEL's CFG runs through a bespoke plugin built on torch.distributed.
We built M* because we wanted to make it easier for current and future composite models to achieve state-of-the-art efficiency. We found that current systems could be generalized into the M* Walk Graph.
| vLLM-Omni | SGLang-Omni | M* (ours) | |
|---|---|---|---|
| Graph node | Engine-instance stage | Worker-pool stage | Model component |
| Composition | Flat DAG | Flat DAG | Seq. / Par. / Loop / Stream |
| Paths per model | Prefill, decode | Prefill, decode | Flexible |
| Loops | Within a stage | Within a stage | Across any subgraph |
| Placement | Stage | Stage | Component, w/ optional Walk |
Table 1. Each prior abstraction is a restricted subset of the Walk Graph.
The Walk Graph, by example
In M*, a model is declared as a graph of model component nodes connected by tensor edges, plus a set of named Walks. Each walk is a labeled subgraph for one phase of behavior. A request is a series of Walks, chosen by a small state machine the model author writes. The author provides only the graph and the walks. Everything physical — placement, scheduling, batching, tensor transport, streaming — is the runtime's job.
combine_cfg and two extra LLM views when CFG runs in parallel), and the Walks a request strings together.
For example, BAGEL has four core components — vit_encoder, vae_encoder, the LLM, and vae_decoder — and a handful of Walks. The state machine strings them together differently per request:
- Generate an image (text → image):
prefill_text→image_gen - Understand an image (image → text):
prefill_text→prefill_vit→decode - Edit an image (image → image):
prefill_text→prefill_vae→prefill_vit→image_gen
Defining requests as Walks means that the runtime executes only the components a request needs. Image understanding never touches the diffusion loop or the vae_decoder; image generation never runs the ViT understanding path.
Walks are run based on a state machine the author writes: it builds the prefill steps from the input modalities, then transitions to decode or image generation based on the requested output (note: this is a simplification of the actual M* model code):
# Pick the next Walk based on the current phase.
def next_walk(self, state):
if state.prefill_steps: # still consuming inputs
return state.prefill_steps.pop(0) # prefill_text / prefill_vae / prefill_vit
if state.target == "image":
return "image_gen" # image_gen_cfg when CFG is configured
return "decode" # otherwise, autoregressive text
Start with one node
A node names its inputs and declares where each output goes. BAGEL's vae_decoder takes denoised latents and emits an image to the client:
from mminf.graph.base import GraphNode, GraphEdge
from mminf.graph.special_destinations import EMIT_TO_CLIENT
vae_decoder = GraphNode(
name="vae_decoder",
input_names=["latents"],
outputs=[
GraphEdge(next_node=EMIT_TO_CLIENT, name="image_output",
output_modality="image"),
],
)
The graph only names inputs, outputs, and wiring. The compute behind a node is a torch.nn.Module — the model author implements prepare_inputs and a pure-tensor forward, and the runtime handles batching, KV caching, CUDA graphs, and tensor transport.
Here is that Submodule for the vae_decoder node:
class VAEDecoderSubmodule(NodeSubmodule): # NodeSubmodule is a torch.nn.Module
def __init__(self, vae_model):
self.vae_model = vae_model
def prepare_inputs(self, graph_walk, fwd_info, inputs):
# gather the tensors this node consumes from its input edges
return NodeInputs(tensor_inputs={"latents": inputs["latents"][0]})
def forward(self, graph_walk, engine_inputs, latents):
# pure tensor compute; outputs are keyed to the node's output edges
image = self.vae_model.decode(unpatchify(latents))
return {"image_output": [image]}
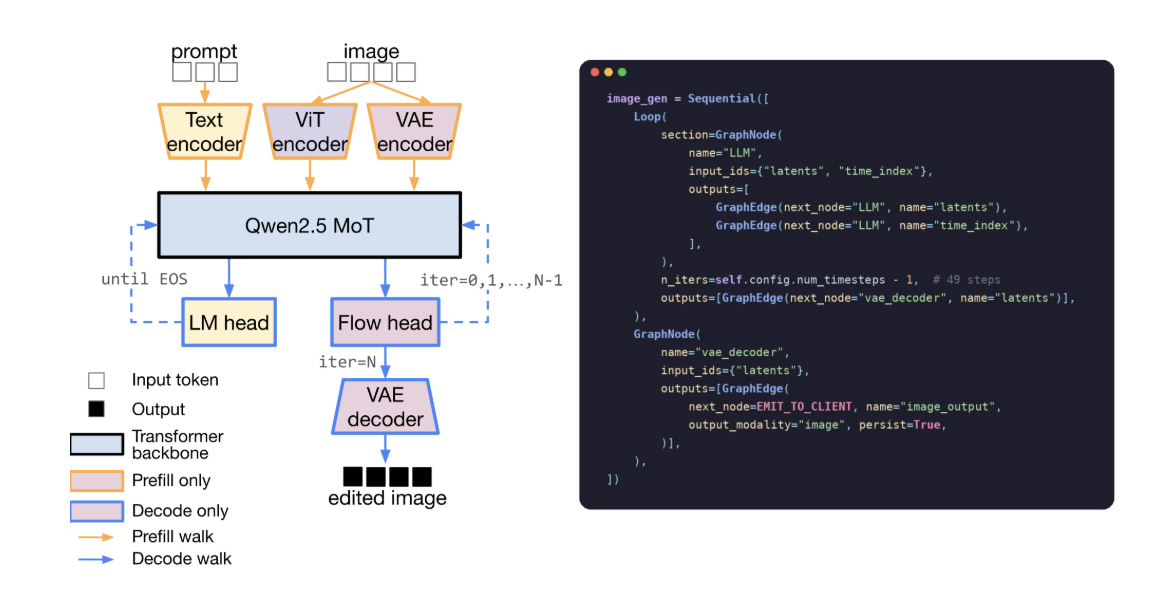
Add a loop
BAGEL generates an image by running flow-matching steps on its LLM backbone, then decoding the final latents to pixels. This can be expressed in M* with a Loop, which runs its section repeatedly, feeding each step's outputs back as the next step's inputs. When the loop finishes, its outputs route forward — here, the latents route to the vae_decoder we just built:
from mminf.graph.base import Sequential, Loop
image_gen = Sequential([
Loop(
section=GraphNode(
name="LLM",
input_names=["latents", "time_index"],
outputs=[
GraphEdge(next_node="LLM", name="latents"),
GraphEdge(next_node="LLM", name="time_index"),
],
),
max_iters=49, # num_timesteps - 1
outputs=[GraphEdge(next_node="vae_decoder", name="latents")],
),
vae_decoder, # the node from above
])
The same Loop primitive covers autoregressive text decode (it stops on an end-of-sequence signal instead of a fixed count) and world-model rollout (it stops at the horizon). Nothing here is special-cased to images. Furthermore, because Loops are generic, M* applies continuous batching and CUDA-graph replay to flow steps exactly as it does to token decode.
Note: BAGEL's diagram splits the model into a backbone, an LM head, a flow head, a time embedder — yet the code has a single LLM node. That is a design choice for performance: BAGEL's flow projection and time embedder are one or two linear layers each and both run on the same hidden states as the backbone, so M* keeps them inside the one LLM node — splitting them out would add scheduling and input preparation overhead on the image-generation critical path, with no performance benefit. The ViT and VAE are separate nodes, because they genuinely differ in compute and placement needs.
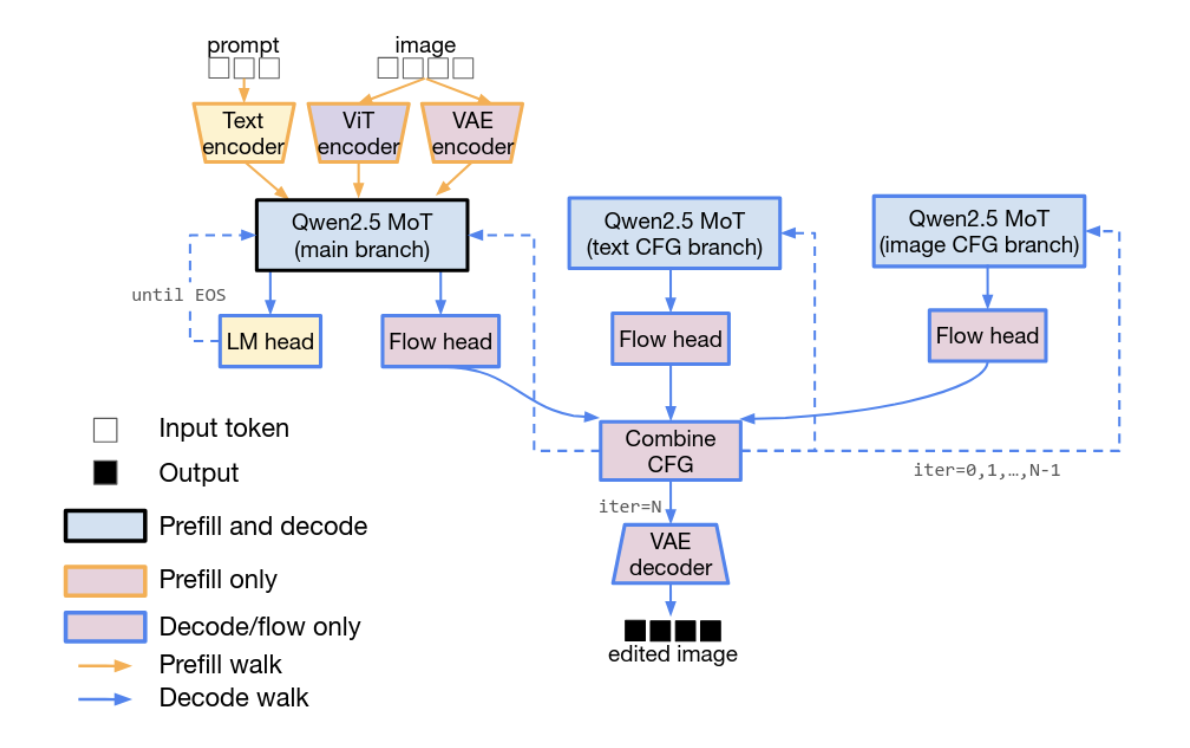
Add parallelism
Classifier-free guidance (CFG) runs three forward passes per denoising step — an unconditional pass and two conditioned ones — and combines them. Running these in parallel is ideal for minimizing latency. Unfortunately, this kind of pattern is hard to capture in the flat stage pipelines used by vLLM-Omni or SGLang-Omni. Because three-way CFG can't be natively supported, it requires a bespoke per-model plugin (e.g., a CFGParallelMixin that all_gathers velocities across ranks in vLLM).
Meanwhile, M* handles all parallelism in a generic way, so the user just needs to express the parallelism to the runtime. This is done with a Parallel block of three LLM "views" that fan into a combine_cfg node and loop. Each branch can sit on its own GPU; the runtime places and merges them with no per-model glue code (listing lightly simplified):
from mminf.graph.base import Parallel
image_gen_cfg = Sequential([
Loop(
section=Sequential([
Parallel([
GraphNode(name="LLM", input_names=["latents", "time_index"],
outputs=[GraphEdge(next_node="combine_cfg", name="v_main")]),
GraphNode(name="LLM_cfg_text", input_names=["latents", "time_index"],
outputs=[GraphEdge(next_node="combine_cfg", name="v_cfg_text")]),
GraphNode(name="LLM_cfg_img", input_names=["latents", "time_index"],
outputs=[GraphEdge(next_node="combine_cfg", name="v_cfg_img")]),
]),
GraphNode(
name="combine_cfg",
input_names=["v_main", "v_cfg_text", "v_cfg_img", "latents", "time_index"],
outputs=[
GraphEdge(next_node="LLM", name="latents"),
GraphEdge(next_node="LLM", name="time_index"),
GraphEdge(next_node="LLM_cfg_text", name="latents"),
GraphEdge(next_node="LLM_cfg_text", name="time_index"),
GraphEdge(next_node="LLM_cfg_img", name="latents"),
GraphEdge(next_node="LLM_cfg_img", name="time_index"),
],
),
]),
max_iters=49,
outputs=[GraphEdge(next_node="vae_decoder", name="latents")],
),
vae_decoder,
])
How do the three LLM views connect to the real model? Each node name maps to a Submodule, and the three CFG branches are the same language model wrapped under three names, differing only in which guidance cache they read and write.
Placement
Placement is a small YAML file that maps logical nodes to physical GPU ranks. Nothing in the model code changes when you move components around. Mapping each node to GPU ranks — disaggregating components, disaggregating prefill from decode, or using tensor-parallel sharding — always uses the same placement API, so you can shard a big Qwen3-Omni backbone while disaggregating its encoders and codec elsewhere.
As an example, the same BAGEL graph runs on one GPU:
# Single GPU: everything colocated
model: "bagel"
node_groups:
- { node_names: [vit_encoder, vae_encoder, vae_decoder, LLM], ranks: [0] }
…or fans the three CFG branches across three GPUs — active only during image generation — by editing the same file:
# Three GPUs: CFG branches on their own ranks, only during image_gen_cfg
model: "bagel"
node_groups:
- { node_names: [vit_encoder, vae_encoder, vae_decoder], ranks: [0] }
- { node_names: [LLM, combine_cfg], ranks: [0] }
- { node_names: [LLM_cfg_text], ranks: [1], graph_walks: [image_gen_cfg] }
- { node_names: [LLM_cfg_img], ranks: [2], graph_walks: [image_gen_cfg] }
The graph_walks key lets you place a node differently per Walk. For example, prefill for a node can happen on one GPU while decode happens on another.
Streaming, by example: Qwen3-Omni
Some components have to overlap in time. Qwen3-Omni speaks by pipelining three components: a Thinker (the LLM that produces hidden states and text), a Talker (an autoregressive model that turns those into audio codec tokens), and Code2Wav (a code-to-waveform codec decoder). To start playing audio before the whole response is computed, the Thinker streams one hidden state at a time to the Talker, and the Talker streams codec frames to Code2Wav.
In M*, streaming is a first-class edge type: the producer just marks an output as streaming to a downstream partition, and a chunk policy — declared once in the model's topology and matched to the edge by name — decides how the consumer reassembles the stream:
from mminf.streaming.topology import Connection, PartitionTopology, StreamingGraphEdge
from mminf.streaming.chunk_policy import FixedChunkPolicy, LeftContextChunkPolicy
# Inside the Thinker's walk: hidden states stream to the Talker.
StreamingGraphEdge(next_node="Talker", name="thinker_states",
target_partition="Talker")
# Inside the Talker's walk: codec frames stream to Code2Wav.
StreamingGraphEdge(next_node="Code2Wav", name="codec_tokens",
target_partition="Code2Wav")
# How each stream is reassembled is declared once, in the model's topology:
PartitionTopology(
partitions=["Thinker", "Talker", "Code2Wav"],
connections=[
Connection(from_partition="Thinker", to_partition="Talker",
edge_name="thinker_states",
chunk_policy_factory=lambda: FixedChunkPolicy(chunk_size=1,
continue_after_done=True)),
Connection(from_partition="Talker", to_partition="Code2Wav",
edge_name="codec_tokens",
chunk_policy_factory=lambda: LeftContextChunkPolicy(chunk=25,
left_context=25)),
],
)
FixedChunkPolicy(chunk_size=1) feeds the Talker one Thinker state per step; LeftContextChunkPolicy hands Code2Wav 25-frame chunks plus 25 frames of left context to warm up its causal convolutions. The Talker runs as an autoregressive Loop; Code2Wav is re-triggered per chunk. The result is three components on three GPUs, overlapping in time, emitting audio incrementally. The same small set of chunk policies — fixed, sliding-window, left-context — covers every streaming edge in our models (Orpheus's SNAC decoder uses the sliding-window one), instead of bespoke per-model streaming code.
What the Walk Graph unlocks
Decoupling the model from the runtime is where the performance comes from:
- Modality-aware scheduling: run only the components a request needs. A Walk names exactly which parts of the model participate in a request, allowing text-only responses to bypass image-generation paths and enabling fine-grained execution patterns across diverse multimodal architectures.
- Reusable systems optimizations: execution stages share a common interface, allowing techniques such as paged attention, FlashInfer kernels,
torch.compile, and CUDA Graphs to be applied across diverse components without bespoke integration work. - Flexible parallelism: express parallelism within a graph stage with
Parallel(e.g., the three CFG branches); the runtime executes all instances of parallelism uniformly. - Flexible placement: map each node to GPU rank(s) to support encoder/decoder disaggregation, prefill/decode/flow disaggregation split, independent scaling of components, transparent multiplexing of one replica across requests, and tensor-parallel sharding one large component across GPUs.
- Loops are first-class: Continuous batching and CUDA-graph replay apply to any loop, so diffusion steps, world-model rollouts, and token decode all ride the same machinery — and a rollout's KV cache persists across steps instead of being recomputed.
- Streaming is first-class: One small set of chunk policies covers every streaming edge. Streaming follows the same interface regardless of placement, with connections between colocated components requiring no communication overhead.
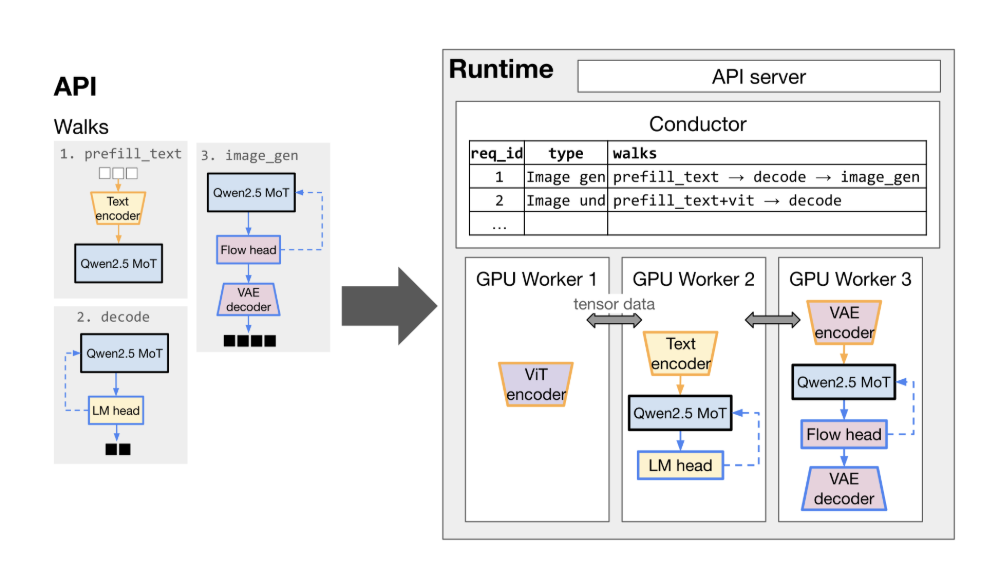
Under the hood
M* lowers the graph to a distributed runtime. A Conductor tracks each request's Walk and dispatches work to per-GPU Workers that route tensors directly to one another. Some key features:
- Pluggable data plane: components exchange tensors over shared memory, RDMA, or TCP (via Mooncake), chosen by where the components are located.
- A handful of engines: a modality-agnostic "AR" engine with a FlashInfer paged-attention KV cache, plus a stateless engine (handles encoders, decoders, audio codecs); all support continuous batching and CUDA-graph replay.
- Overlapped scheduling: while the current step runs on the GPU, M* prepares the next batch and its attention plan on a separate stream, and keeps loops moving by deferring each stop check by one iteration. This is implemented generically over the
Loopprimitive — not just for text or speculative decoding — so the GPU rarely stalls on CPU scheduling. - Sharding × disaggregation: tensor-parallel sharding (parallel linears, vocab-parallel embeddings, sharded MoE and KV cache, NCCL collectives) is built in and set with a
tp_sizein the placement file, so one large component doesn't have to fit on one GPU.
Does it work? — Matching or beating specialized systems
We instantiate M* on five real models and compare against the strongest specialized baseline for each.
| Model · task | Baseline(s) | Setup | Speedup over baseline |
|---|---|---|---|
| BAGEL · text→image | vLLM-Omni | 3×H100, CFG-parallel, B=1 | ≈1.3× lower latency |
| BAGEL · image editing | vLLM-Omni | 3×H100, CFG-parallel, B=1 | up to 2.6× lower latency |
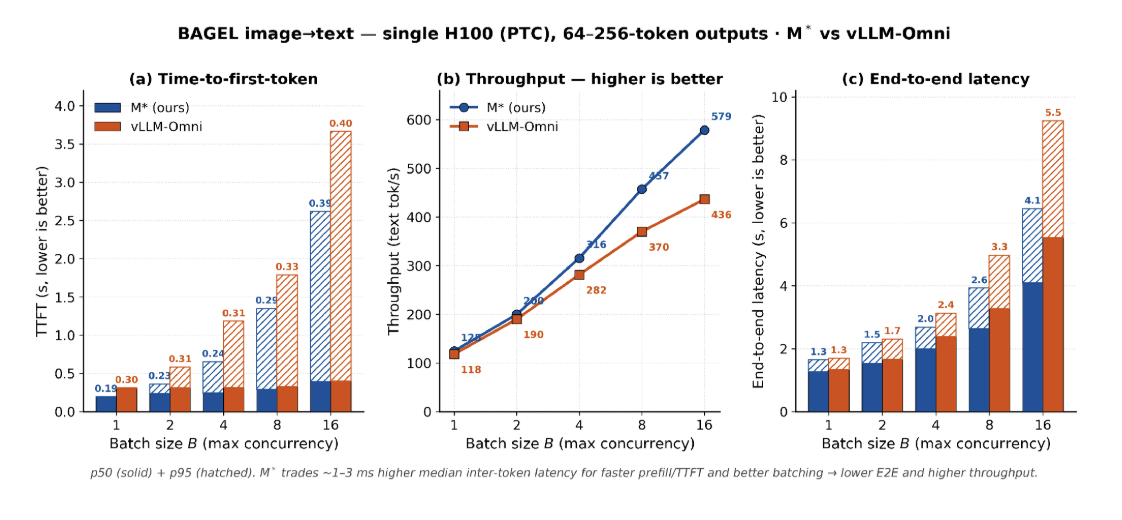
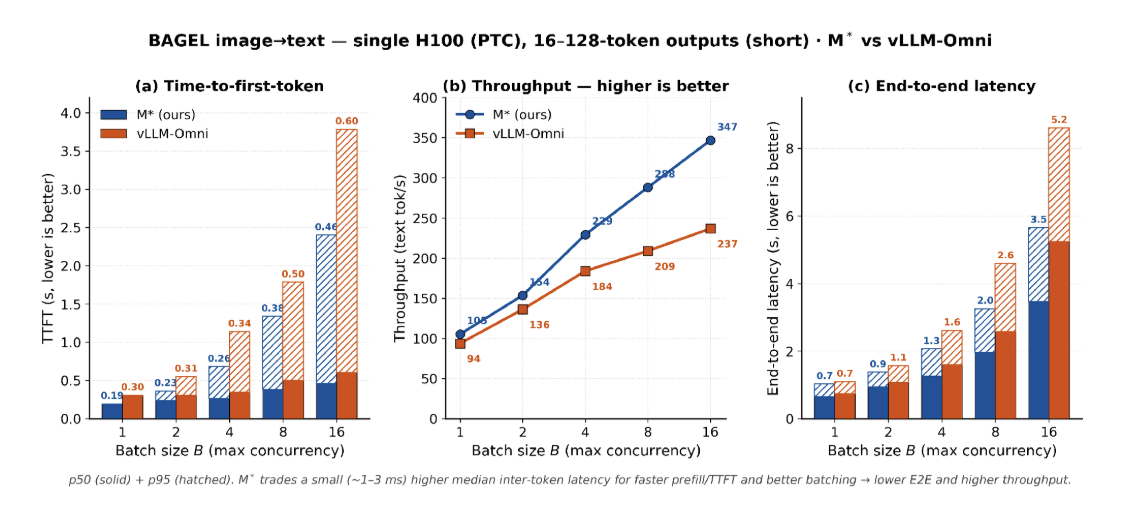
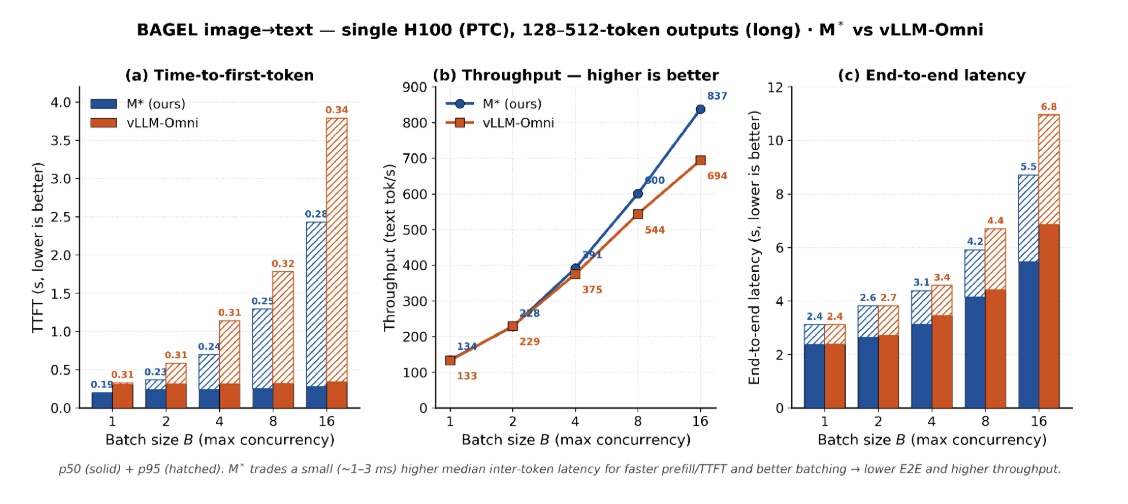
| BAGEL · image→text | vLLM-Omni | 1×H100, B≤16 | ≈1.6× faster first token |
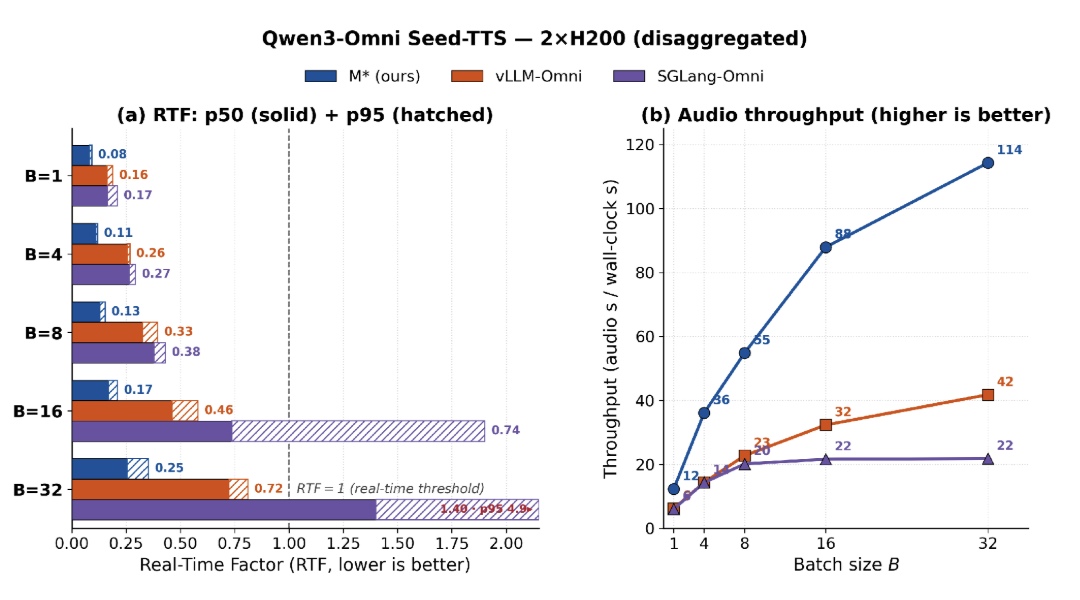
| Qwen3-Omni · TTS | vLLM-Omni, SGLang-Omni | 2×H200 | ≈2.7× higher throughput vs vLLM-Omni @ B=16 (≈4× vs SGLang) |
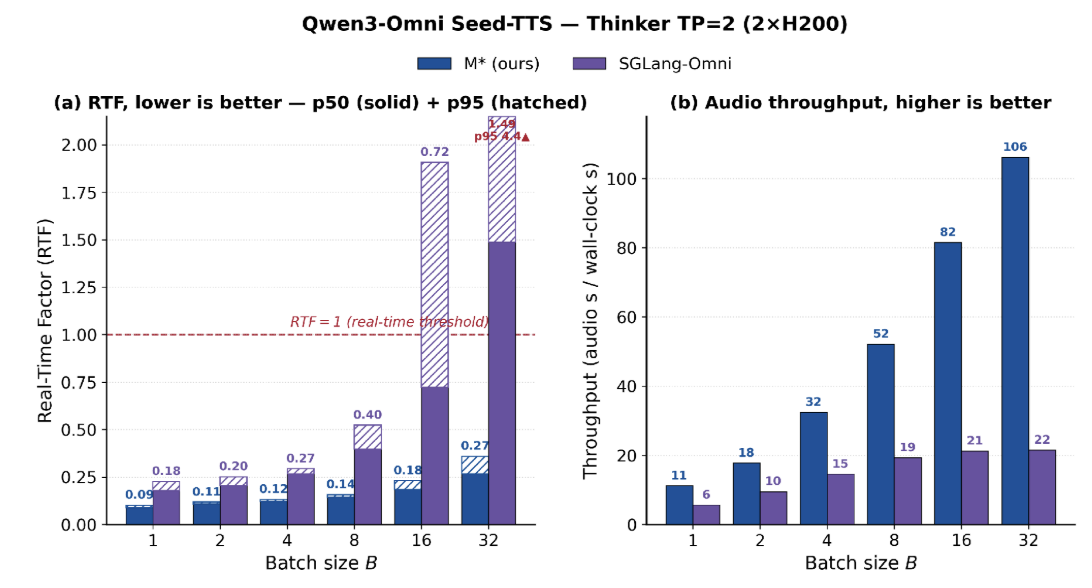
| Qwen3-Omni · TTS (TP-2 thinker) | SGLang-Omni | 2×H200, Thinker sharded | ≈3.8× higher throughput @ B=16 |
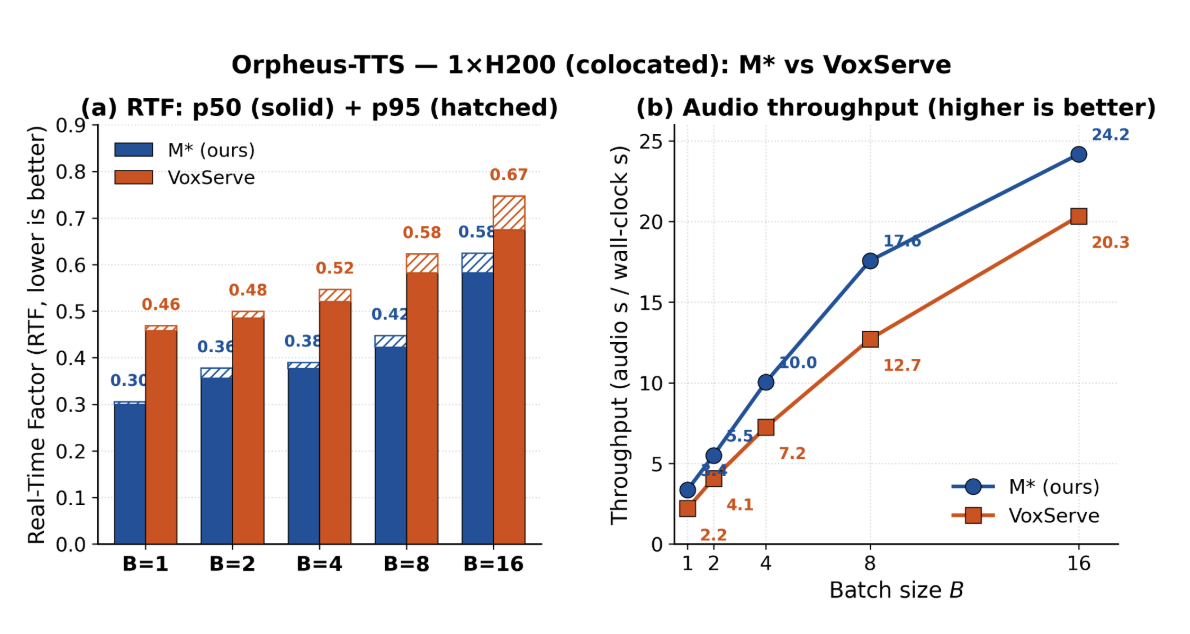
| Orpheus · TTS | VoxServe | 1×H200 | ≈1.3× higher throughput @ B=8 and lower RTF |
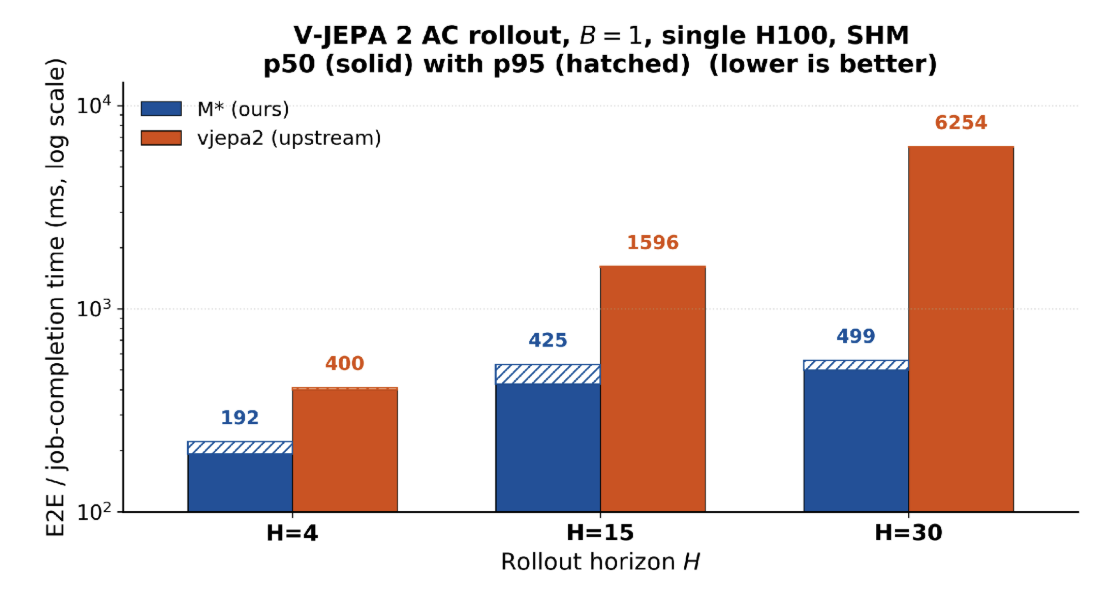
| V-JEPA 2 · rollout | Meta native | 1×H100 | up to 12.5× faster |
The wins come from the abstraction. For image generation and editing, M* runs BAGEL's three-way classifier-free guidance as a Parallel block spread across three GPUs, and finishes faster than every vLLM-Omni configuration: about 1.3x lower end-to-end latency on text-to-image, and up to 2.6x on image editing versus vLLM-Omni's default pipeline. Against vLLM-Omni's best-tuned single-stage configuration, the editing margin is about 1.2x.
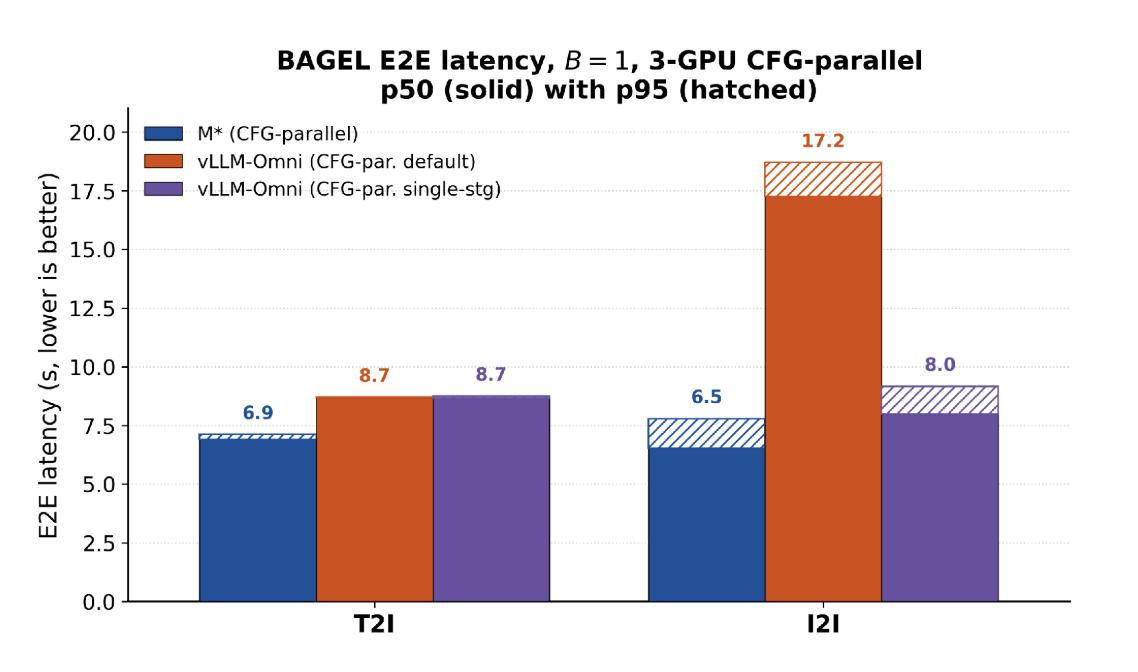
What is vLLM-Omni's "single-stage" config? By default, vLLM-Omni runs BAGEL as two stages — a Thinker (text and understanding, on vLLM's autoregressive engine) feeding a separate DiT stage for image generation, with the conditioning KV cache shipped between them. The single-stage config collapses the whole model — LLM, ViT, VAE, and DiT — into one diffusion process, eliminating that cross-stage transfer: it matches the default on text-to-image (where the transferred text conditioning is small) but is much faster on editing (where the conditioning includes an encoded image). The catch is that text and understanding then run inside the diffusion engine rather than vLLM's AR engine, giving up continuous batching, token streaming, and paged-attention KV management — a whole-model choice that speeds up editing at the expense of the text path. M* needs no such bargain: because a Walk names exactly the components a request uses, image-generation and understanding requests each execute the right way, with the engine optimizations intact.
Image understanding is more nuanced. Because a Walk names exactly the components a request touches, an image-to-text request never runs the diffusion path, so M* returns the first token about 1.6x faster than vLLM-Omni and holds a throughput lead that grows with batch size, reaching about 46% for short outputs. The cost is a slightly higher median inter-token latency, roughly 1 to 3 ms. M*'s advantage is therefore largest under load and for shorter responses, and narrows to near-parity for long outputs at low concurrency.
Speech and omni models follow the same pattern. On Qwen3-Omni text-to-speech, M* sustains about 2.7x the throughput of vLLM-Omni and about 4x that of SGLang-Omni, and it stays real-time through batch size 32, where SGLang-Omni's tail latency runs past the real-time threshold. Sharding the Thinker across two GPUs keeps about a 3.8x throughput lead, an example of sharding and disaggregation working together. On Orpheus, M* posts a lower real-time factor and higher audio throughput than VoxServe at every batch size we benchmarked.
World models show what first-class loops buy. M* expresses the rollout as a Loop with a persistent KV cache instead of recomputing it from scratch each step, which yields up to 12.5x over Meta's native rollout.
What's next
The bigger picture the Walk Graph opens up — three directions we are actively pursuing:
- SLO-aware placement and path-aware autoscaling: search automatically for a node-and-Walk to worker placement that meets an objective (throughput, latency, or cost), and rescale to the live traffic mix: scale up only the components on hot Walks, and offload cold ones to host memory off the critical path.
- An agentic serving layer: an agent is itself a graph over model calls, the same shape M* runs inside one model; we are building a layer that places the inter-model agent graph and the intra-model component graph under one runtime, so calls across many agents share scheduling, placement, batching, and cached state.
- A compiler for the Walk Graph: treated as an IR, the graph enables graph-level optimization (eliminating components a request never touches, fusing operations, scheduling the overlap above) and mapping each component to the hardware it runs best on (compilation/mapping to heterogeneous hardware).
Get the code
M* is open source. If you build on this work, please cite it:
@inproceedings{mstar2026,
title = {M*: A Modular, Extensible, Serving System for Multimodal Models},
author = {Atindra Jha and Naomi Sagan and Keisuke Kamahori and Irmak Sivgin and
Rohan Sanda and Steven Gao and Mark Horowitz and Luke Zettlemoyer and
Olivia Hsu and Jure Leskovec and Baris Kasikci and Stephanie Wang},
year = {2026},
note = {Preprint}
}