We built a system that enables collecting large-scale robot manipulation datasets with human supervision and used it to collect the largest robot dataset ever collected via teleoperation.
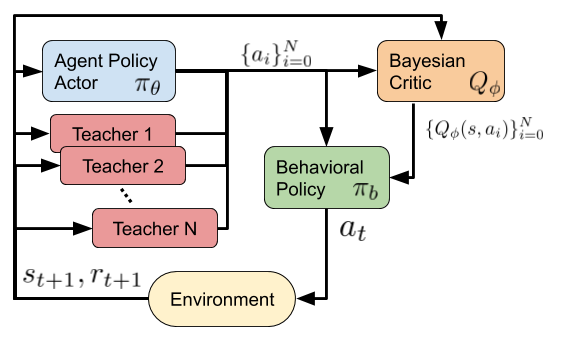
Presenting AC-Teach, a unifying approach to leverage advice from an ensemble of sub-optimal teachers in order to accelerate the learning process of actor-critic reinforcement learning agents.
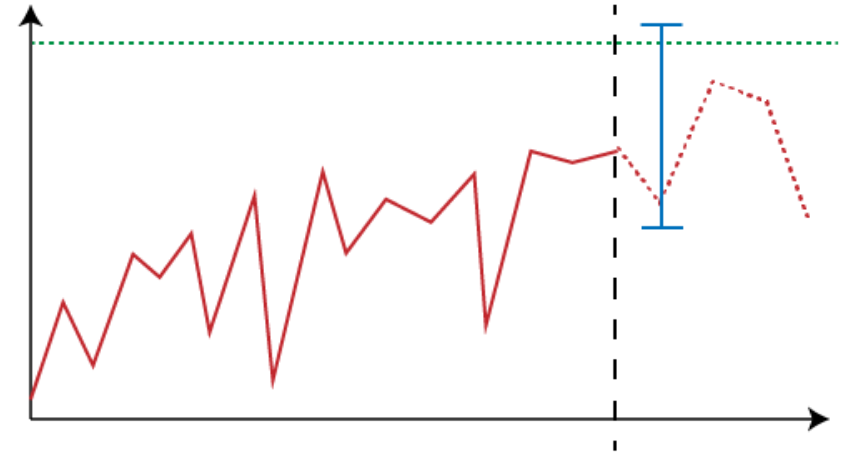
Introducing a new method that achieves minimax-optimal probably approximately correct (and regret) bounds which match the statistical worst-case lower bounds in the dominating terms for reinforcement learning.
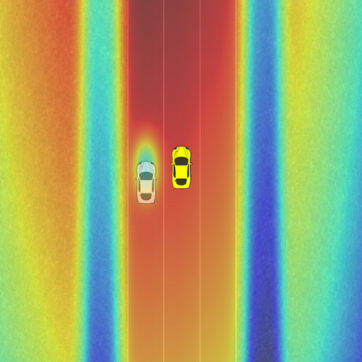
An overview of research at SAIL related to new techniques that allow us to look inside the black box of neural networks, to how it is possible to find and remove bias, and to how safety in autonomous systems can be assured.