![]()
The Robotics: Science and Systems (RSS) 2025 is being hosted in Los Angeles from June 21st-25th. We’re excited to share all the work from SAIL that’s being presented, and you’ll find links to papers, videos and blogs below. Feel free to reach out to the contact authors directly to learn more about the work that’s happening at Stanford!
List of Accepted Papers
SLAP: Shortcut Learning for Abstract Planning
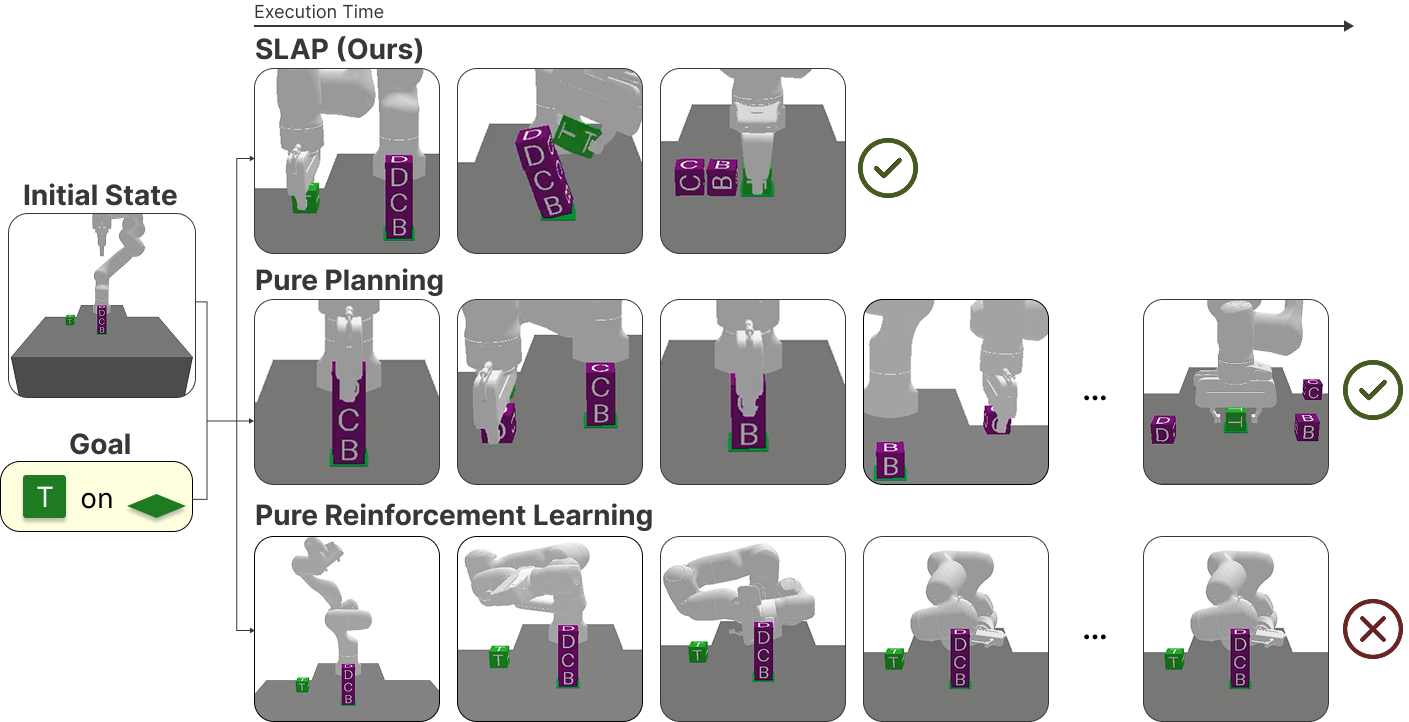
Contact: isabel.liu@princeton.edu
Venue: Workshop
Keywords: robotics and control, reinforcement learning algorithms
CUPID: Curating Data your Robot Loves with Influence Functions
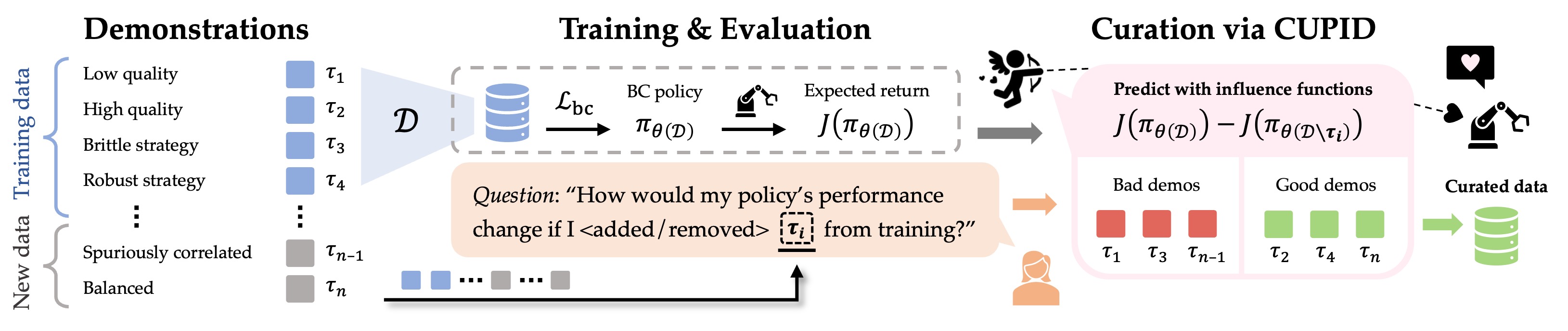
Contact: cagia@stanford.edu
Venue: Workshop
Keywords: imitation learning, data curation, influence functions
Compliant Residual DAgger: Improving Real-World Contact-Rich Manipulation with Human Corrections
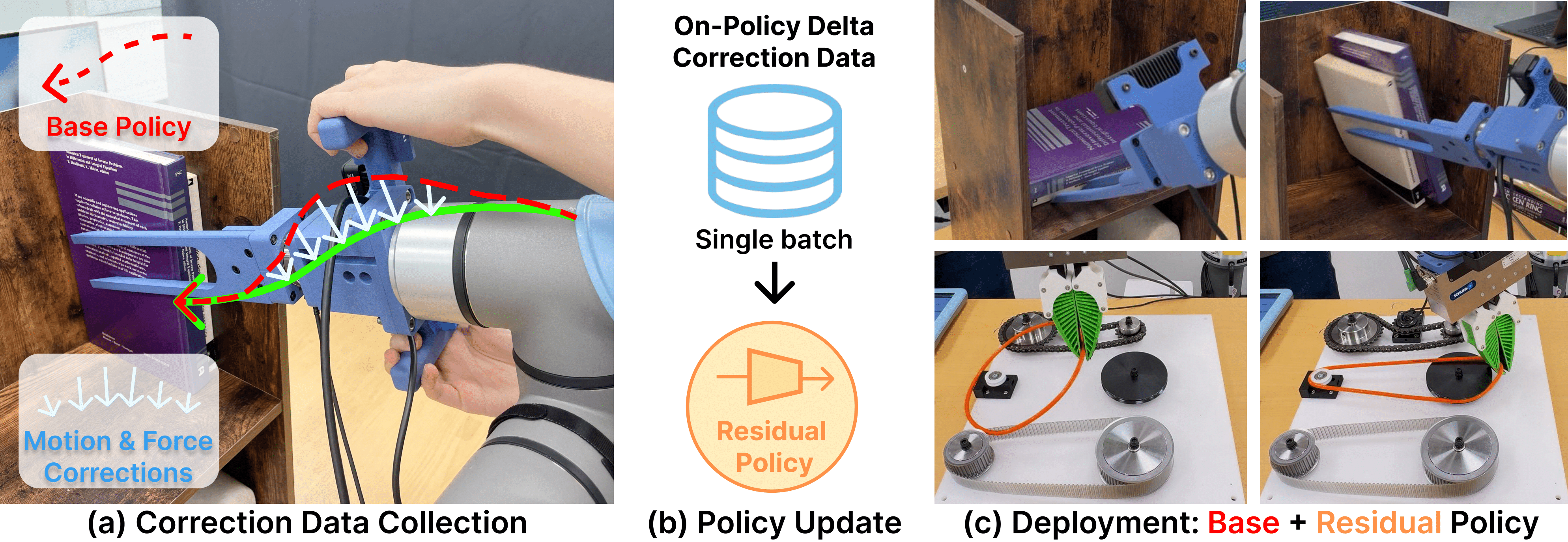
Contact: xuxm@stanford.edu
Venue: Workshop
Keywords: dagger, compliance control, contact-rich manipulation
Learning Long-Context Diffusion Policies via Past-Token Prediction
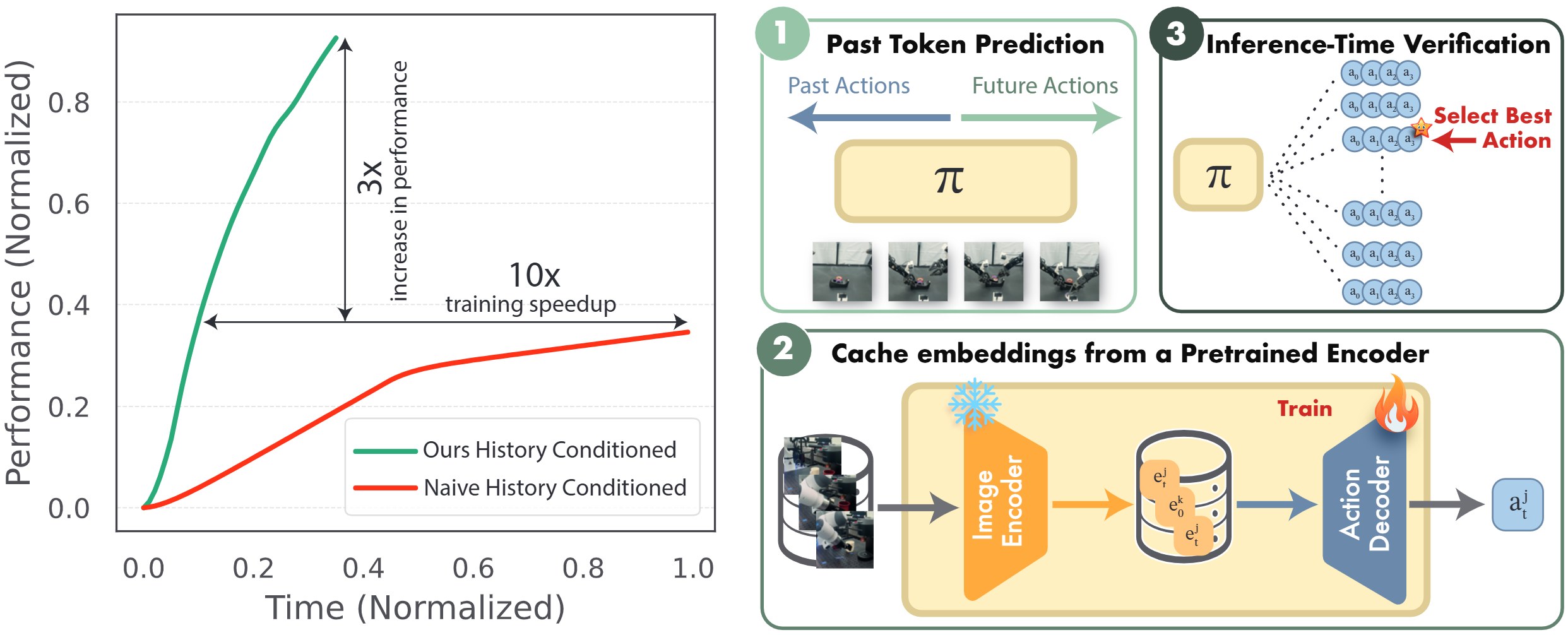
Contact: marcelto@stanford.edu, yuejiang.liu@stanford.edu
Venue: Workshop
Keywords: robot learning, diffusion policy, long context
Scaffolding Dexterous Manipulation with Vision-Language Models
Contact: debakker@cs.stanford.edu
Venue: Workshop
Award nominations: Spotlight
Keywords: dexterous manipulation, vision-language models, reinforcement learning
Self-Guided Action Diffusion
Contact: rheamal@stanford.edu
Venue: Workshop
Award nominations: Firestone Medal for Research
Keywords: inference-time adaptation, trajectory coherence, temporal consistency, policy generalization
BEHAVIOR Robot Suite: Streamlining Real-World Whole-Body Manipulation for Everyday Household Activities

Contact: yunfanj@cs.stanford.edu
Venue: Workshop
Award nominations: Spotlight Presentation
Links: Paper | Blog Post | Video | Website
Keywords: whole-body manipulation, mobile manipulation, household tasks, imitation learning
Deformable Cargo Transport in Microgravity with Astrobee
Contact: dmorton@stanford.edu
Venue: Workshop
Award nominations: Best paper finalist for the Space Robotics Workshop
Links: Paper | Video | Website
Keywords: space robotics, manipulation, deformables
PhD Student (Computer Science)
Contact: moojink@stanford.edu
Venue: Main Conference
Links: Paper | Video | Website
Keywords: vision-language-action models, imitation learning, robotic manipulation
Real-Time Out-of-Distribution Failure Prevention via Multi-Modal Reasoning
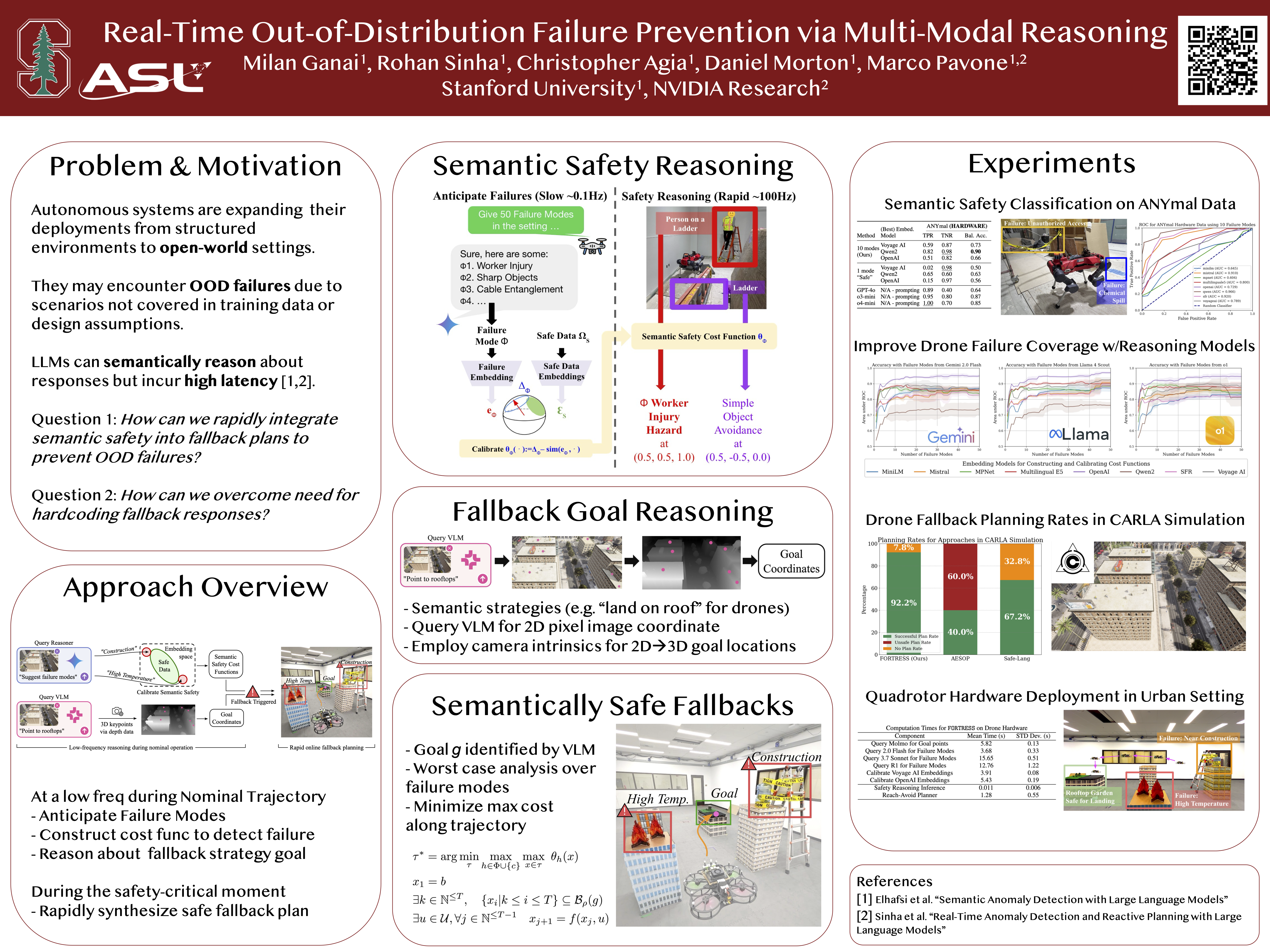
Contact: mganai@cs.stanford.edu
Venue: Workshop
Links: Paper | Video | Website
Keywords: multi-modal reasoning, semantic safety, ood reliability
RoboPanoptes: The All-Seeing Robot with Whole-body Dexterity
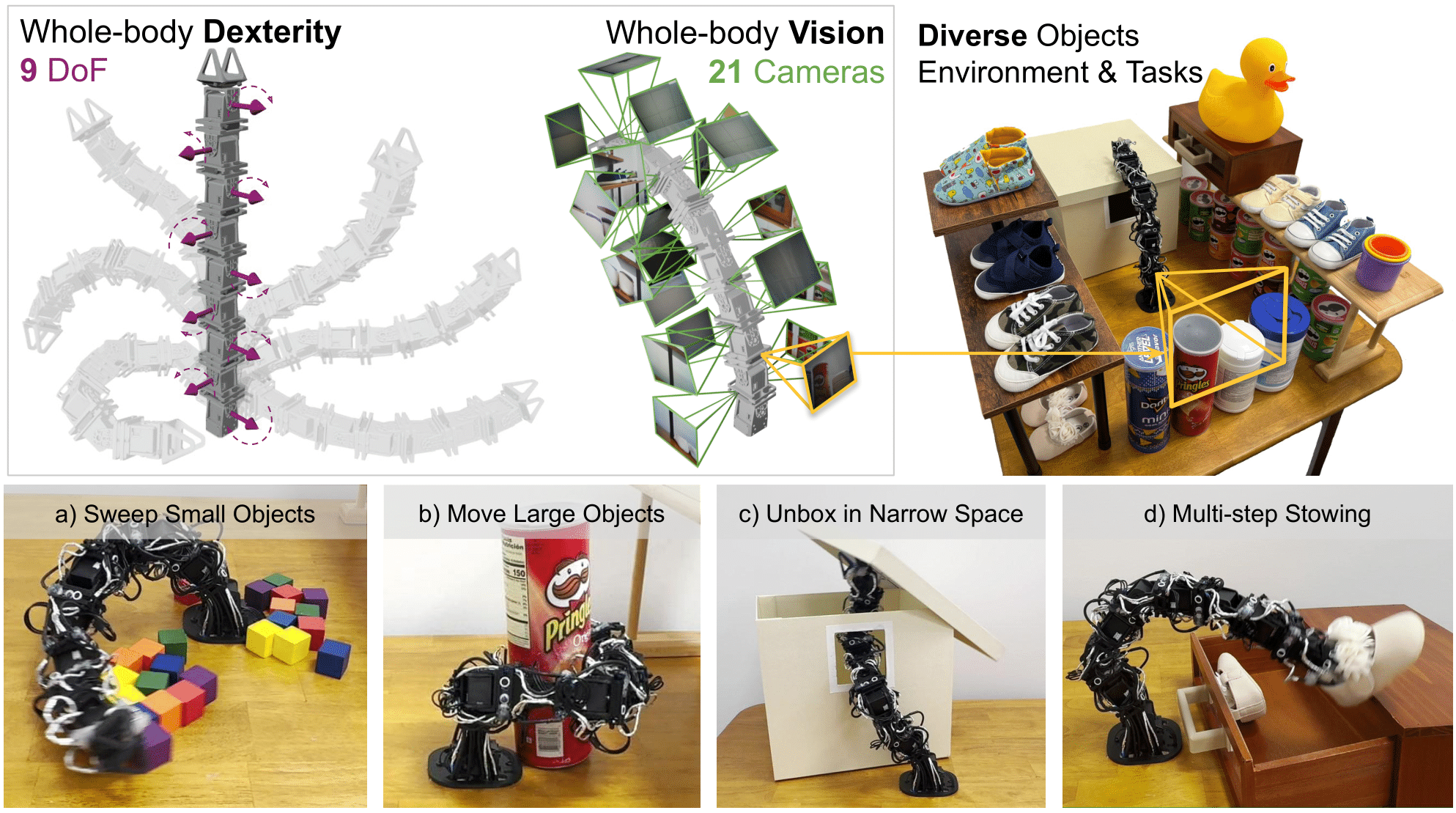
Contact: xuxm@stanford.edu
Venue: Main Conference
Links: Paper | Video | Website
Keywords: whole-body dexterity, whole-body vision
Robot Learning with Super-Linear Scaling
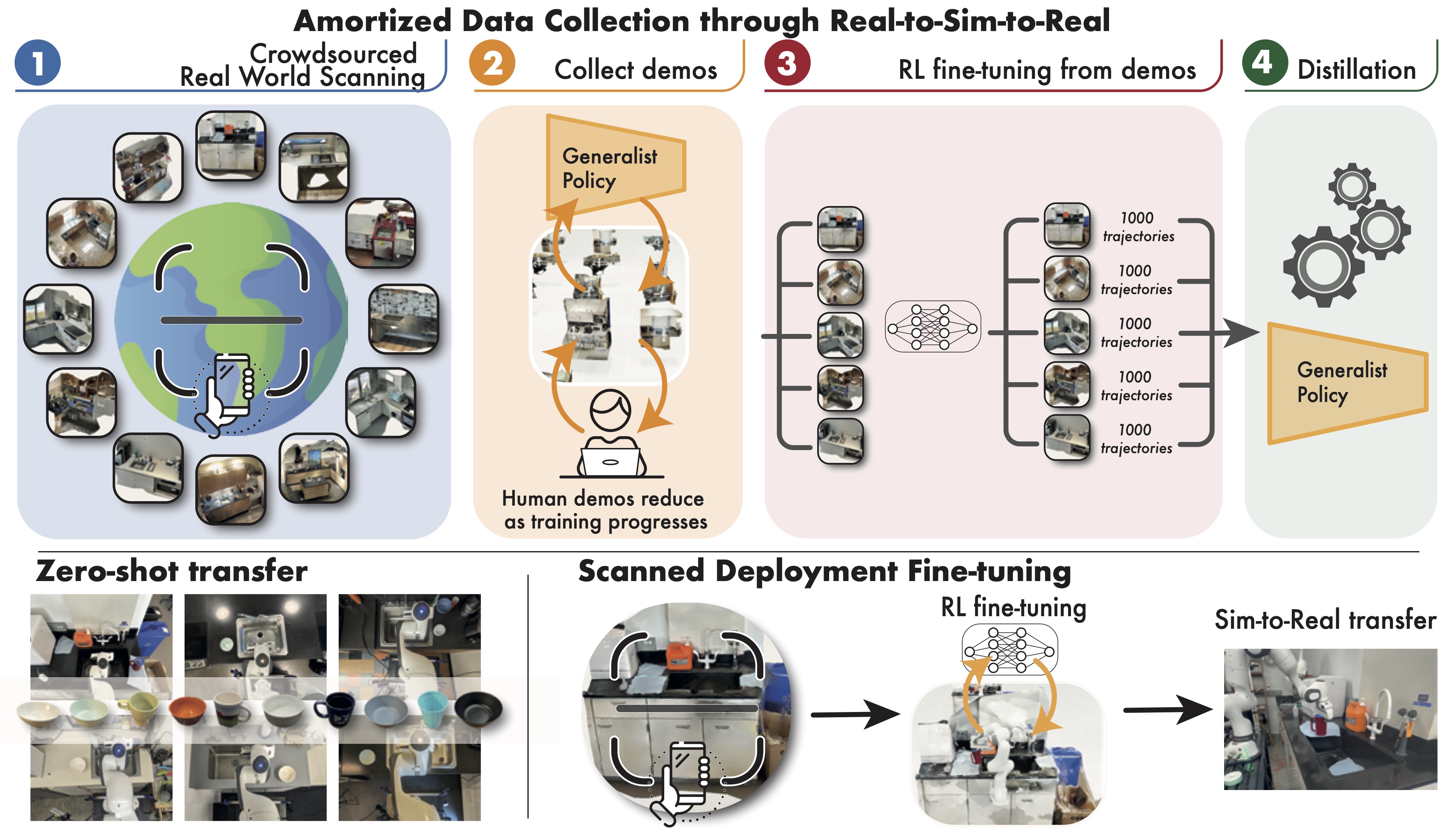
Contact: marcelto@stanford.edu
Venue: Main Conference
Links: Paper | Video | Website
Keywords: robot learning: reinforcement learning, robot modeling & simulation, grasping & manipulation
Self-supervised Multi-future Occupancy Forecasting for Autonomous Driving
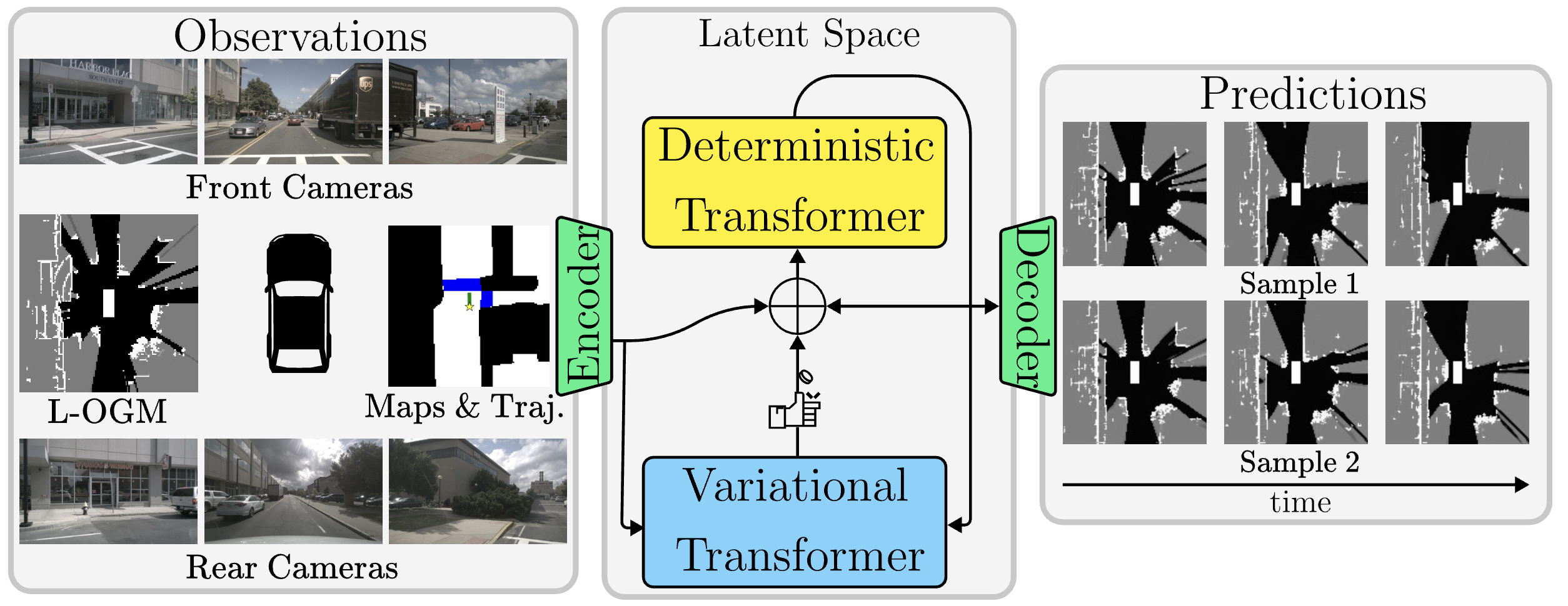
Contact: blange@stanford.edu
Venue: Main Conference
Links: Paper
Keywords: autonomous driving, world model
Unified Video Action Model
Contact: lishuang@stanford.edu
Venue: Main Conference
Links: Paper | Website
Keywords: robot learning, imitation learning, video action models
We look forward to seeing you at RSS!