I'm a Research Scientist in Robotics-AI at NVIDIA, working on post-training steering methods for online controllability of robot policies (diffusion, VLAs), along with VR-based teleoperation systems for data collection and policy evaluation.
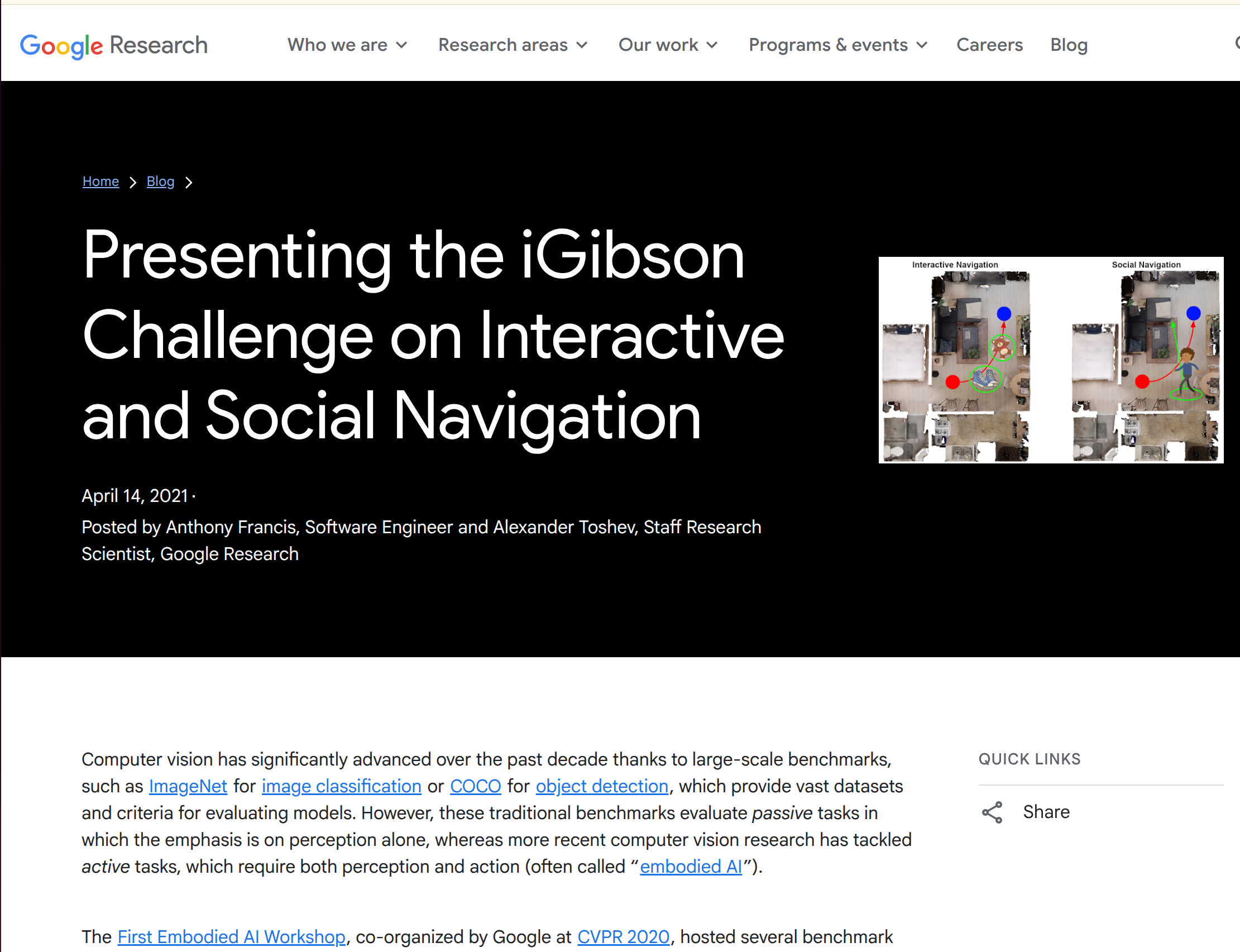
Previously, I was a Postdoctoral Scholar at the Stanford Vision and Learning Lab, working with Silvio Savarese on deep reinforcement learning for robot social navigation and iGibson, a large-scale simulation platform for robot learning. I collaborated with Fei-Fei Li, Karen Liu, and Dorsa Sadigh, and co-instructed CS331B: Interactive Simulation for Robot Learning at Stanford.
I earned my PhD in Computer Science from MIT, advised by Julie Shah. There, I developed a next-generation teleoperation system based on learning from demonstrations, built MIT's Optimus robot, participated in the DARPA Robotics Challenge working with the Atlas robot, and led 100+ live robot demos.
My research has been featured in the NYT, Science Magazine, Wired, MIT News, and CNN, and has received funding from ONR and DARPA.
2025 IEEE International Conference on Robotics and Automation (ICRA 2025)
Principles and guidelines for methods and benchmarking of social robot navigation.
Principles and Guidelines for Evaluating Social Robot Navigation Algorithms.
Anthony Francis*, Claudia Pérez-D'Arpino*, Chengshu Li, Fei Xia, Alexandre Alahi, Rachid Alami, Aniket Bera, Abhijat Biswas, Joydeep Biswas, Rohan Chandra, Hao-Tien Lewis Chiang, Michael Everett, Sehoon Ha, Justin Hart, Jonathan P. How, Haresh Karnan, Tsang-Wei Edward Lee, Luis J. Manso, Reuth Mirsky, Sören Pirk, Phani Teja Singamaneni, Peter Stone, Ada V. Taylor, Peter Trautman, Nathan Tsoi, Marynel Vázquez, Xuesu Xiao, Peng Xu, Naoki Yokoyama, Alexander Toshev, Roberto Martín-Martín.
2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2023)
Retrospective on challenges and progress in embodied AI research.
Retrospectives on the Embodied AI Workshop.
Matt Deitke, Dhruv Batra, Yonatan Bisk, Tommaso Campari, Angel X. Chang, Devendra Singh Chaplot, Changan Chen, Claudia Pérez-D'Arpino, Kiana Ehsani, Ali Farhadi, Li Fei-Fei, Anthony Francis, Chuang Gan, Kristen Grauman, David Hall, Winson Han, Unnat Jain, Aniruddha Kembhavi, Jacob Krantz, Stefan Lee, Chengshu Li, Sagnik Majumder, Oleksandr Maksymets, Roberto Martín-Martín, Roozbeh Mottaghi, Sonia Raychaudhuri, Mike Roberts, Silvio Savarese, Manolis Savva, Mohit Shridhar, Niko Sünderhauf, Andrew Szot, Ben Talbot, Joshua B. Tenenbaum, Jesse Thomason, Alexander Toshev, Joanne Truong, Luca Weihs, Jiajun Wu.
arXiv preprint, 2022
Learning+Planning for social navigation in constrained layouts.
Robot Navigation in Constrained Pedestrian Environments using Reinforcement Learning.
Claudia Pérez-D'Arpino, Can Liu, Patrick Goebel, Roberto Martín-Martín, Silvio Savarese.
2021 IEEE International Conference on Robotics and Automation (ICRA 2021)
iGibson: a simulation environment for interactive tasks in large realistic scenes.
iGibson, a Simulation Environment for Interactive Tasks in Large Realistic Scenes.
Bokui Shen, Fei Xia, Chengshu Li, Roberto Martín-Martín, Linxi Fan, Guanzhi Wang, Claudia Pérez-D'Arpino, Shyamal Buch, Sanjana Srivastava, Lyne P. Tchapmi, Micael E. Tchapmi, Kent Vainio, Josiah Wong, Li Fei-Fei, Silvio Savarese.
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021)
Learning diverse human-robot collaboration strategies via imitation.
Co-GAIL: Learning Diverse Strategies for Human-Robot Collaboration.
Chen Wang, Claudia Pérez-D'Arpino, Danfei Xu, Li Fei-Fei, C. Karen Liu, Silvio Savarese.
5th Conference on Robot Learning (CoRL 2021)
PhD Thesis
Hybrid Learning for Multi-Step Manipulation in Collaborative Robotics.
Claudia Pérez-D'Arpino
Doctor of Philosophy, Computer Science. Massachusetts Institute of Technology, 2019
Learn geometric constraints from demonstrations for multistep manipulation tasks in shared autonomy.
C-LEARN: Learning Geometric Constraints from Demonstrations for Multi-Step Manipulation in Shared Autonomy.
Claudia Pérez-D'Arpino, Julie A. Shah.
2017 IEEE International Conference on Robotics and Automation (ICRA 2017)
Director: User interface for shared autonomy at DRC Finals.
Director: A User Interface Designed for Robot Operation with Shared Autonomy.
Pat Marion, Maurice Fallon, Robin Deits, Andrés Valenzuela, Claudia Pérez D'Arpino, Greg Izatt, Lucas Manuelli, Matt Antone, Hongkai Dai, Twan Koolen, John Carter, Scott Kuindersma, Russ Tedrake.
Journal of Field Robotics, vol. 34, no. 2, pp. 262--280, 2017
Optimus as Theatrical Robot in Shared Autonomy
A Theatrical Mobile-Dexterous Robot Directed through Shared Autonomy.
Claudia Pérez-D'Arpino, Peter Agoos, Andrew Zamore, David Gammons, Evie Kyritsis, Julie Shah.
Proceedings of 2017 Conference on Human-Robot Interaction (HRI2017) Companion, Vienna, Austria, 2017
Prediction of the target of human reaching motion in real time.
Fast Target Prediction of Human Reaching Motion for Cooperative Human-Robot Manipulation Tasks Using Time Series Classification.
Claudia Pérez-D'Arpino, Julie A. Shah.
2015 IEEE International Conference on Robotics and Automation (ICRA 2015)
MIT Team Approach to the DARPA Robotics Challenge.
An Architecture for Online Affordance-based Perception and Whole-body Planning.
Maurice Fallon, Scott Kuindersma, Sisir Karumanchi, Matthew Antone, Toby Schneider, Hongkai Dai, Claudia Perez D'Arpino, Robin Deits, Matt DiCicco, Dehann Fourie, Twan Koolen, Pat Marion, Michael Posa, Andres Valenzuela, Kuan-Ting Yu, Julie Shah, Karl Iagnemma, Russ Tedrake, Seth Teller.
Journal of Field Robotics, vol. 32, no. 2, pp. 229--254, 2015
Human-robot co-navigation using anticipatory indicators.
Human-Robot Co-Navigation Using Anticipatory Indicators of Human Walking Motion.
Vaibhav V. Unhelkar*, Claudia Pérez-D'Arpino*, Leia Stirling, Julie A. Shah. *Equal contribution.
2015 IEEE International Conference on Robotics and Automation (ICRA 2015)
Video Abstract of MIT's entry to the DARPA Virtual Challenge (VRC) in June 2013.
A summary of team MIT's approach to the virtual robotics challenge.
R Tedrake, M Fallon, S Karumanchi, S Kuindersma, M Antone, T Schneider, T Howard, M Walter, H Dai, R Deits, M Fleder, D Fourie, R Hammoud, S Hemachandra, P Ilardi, C Perez-D'Arpino, S Pillai, A Valenzuela, C Cantu, C Dolan, I Evans, S Jorgensen, J Kristeller, JA Shah, K Iagnemma, S Teller.
Video Abstract. 2014 IEEE International Conference on Robotics and Automation
Overview of the hardware and software of an IMU for UAVs.
Development of a Low Cost Inertial Measurement Unit for UAV Applications with Kalman Filter based Attitude Determination.
Claudia Pérez-D'Arpino, Damian Vigouroux, Wilfredis Medina-Meléndez, Leonardo Fermín, Rafael. R. Torrealba, Juan C. Grieco, Gerardo Fernández-López.
2011 IEEE International Conference on Technologies for Practical Robot Applications
Bilateral Control for MIMO systems using the States Convergence technique. Applied to a 2-DOF Helicopter.
Generalized Bilateral MIMO Control by States Convergence with time delay and application for the teleoperation of a 2-DOF helicopter.
Claudia Pérez-D'Arpino, Wilfredis Medina-Meléndez, Leonardo Fermín-León, Juan Manuel Bogado, Rafael R. Torrealba, Gerardo Fernández-López.
2010 IEEE International Conference on Robotics and Automation (ICRA 2010)
Designing, fabricating and testing a passive biomechatronic knee prosthesis.
Through the Development of a Biomechatronic Knee Prosthesis for Transfemoral Amputees: Mechanical Design and Manufacture, Human Gait Characterization, Intelligent Control Strategies and Tests.
Rafael R. Torrealba, Claudia Pérez-D'Arpino, José Cappelletto, Leonardo Fermín-León, Gerardo Fernández-López, Juan C. Grieco.
2010 IEEE International Conference on Robotics and Automation (ICRA 2010)
Using the Mahalanobis Distance to achieve luminosity independent color segmentation. Fast implementation in FPGA.
FPGA-Based Artificial Vision System for Robot and Obstacles Detection under Strong Luminosity Variability
International Conference on Climbing and Walking Robots (CLAWAR), 2009
Take a normalized velocity field for 2-D navigation and use a Fuzzy Inference System (FIS) to get human-inspired speeds for safe navigation around obstacles.
Fuzzy Logic Based Speed Planning for Autonomous Navigation Under Velocity Field Control
Pérez-D'Arpino, Claudia; Medina, Wilfredis; Guzmán, José; Fermín, L.; Fernández, G.
IEEE International Conference on Mechatronics (ICM), 2009
Generate a velocity field for 2-D navigation. Avoid obstacles the same way fluids find their way around them.
Dynamic Velocity Field Angle Generation for Obstacle Avoidance in Mobile Robots Using Hydrodynamics
Ibero-American Conference on Artificial Intelligence (IBERAMIA), 2008
DC motor control combining fuzzy and sliding mode algorithms.
Speed Control of a DC Motor by Using Fuzzy Variable Structure Controller
Perez, Claudia; Strefezza, Miguel.
Chinese Control Conference (CCC), 2008
Talks and Workshops
MIT Embodied Intelligence Seminar
Talk: Interactive Simulation for Robot Learning
February 2021
Invited talk at the MIT Embodied Intelligence Seminar presenting research on robot learning in simulation environments, including iGibson and social navigation.
A research survey of advanced methods for robot learning in simulation, covering agent-environment interactions, imitation and reinforcement learning, sim2real techniques, and multi-agent/human-robot interaction domains. Project-based seminar leveraging iGibson simulation environment.