![]()
The Conference on Robot Learning (CoRL 2022) will take place next week. We’re excited to share all the work from SAIL that will be presented, and you’ll find links to papers, videos and blogs below. Feel free to reach out to the contact authors directly to learn more about the work that’s happening at Stanford!
List of Accepted Papers
PLATO: Predicting Latent Affordances Through Object-Centric Play
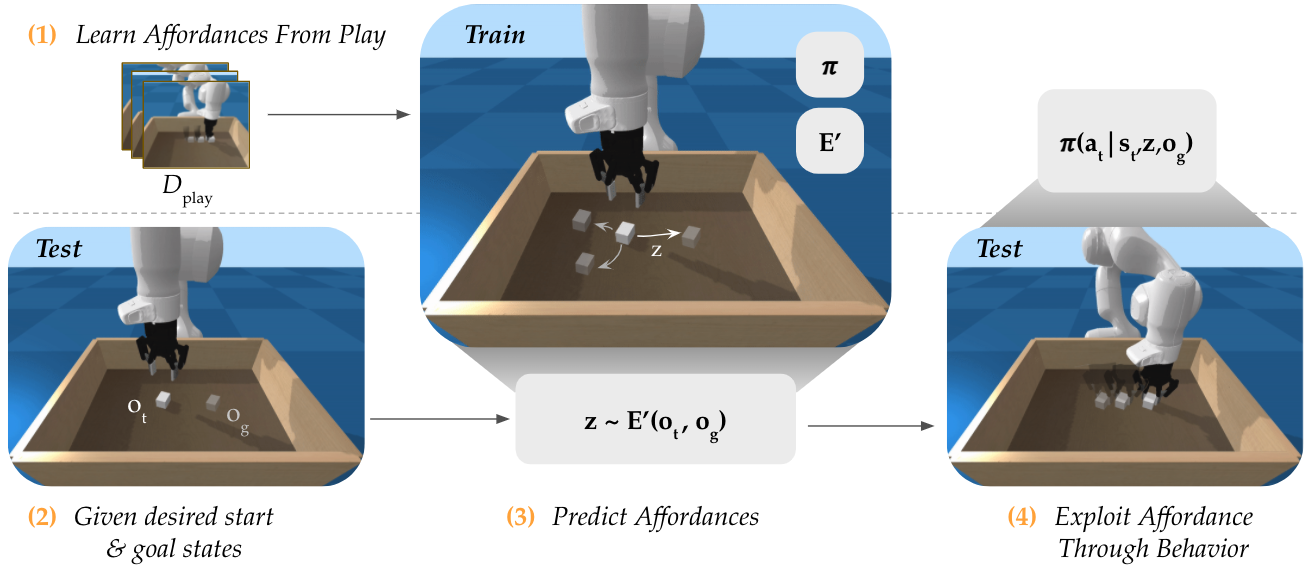 Authors: Suneel Belkhale, Dorsa Sadigh
Authors: Suneel Belkhale, Dorsa Sadigh
Contact: dorsa@stanford.edu
Links: Paper | Video
Keywords: Human Play Data, Object Affordance Learning, Imitation Learning
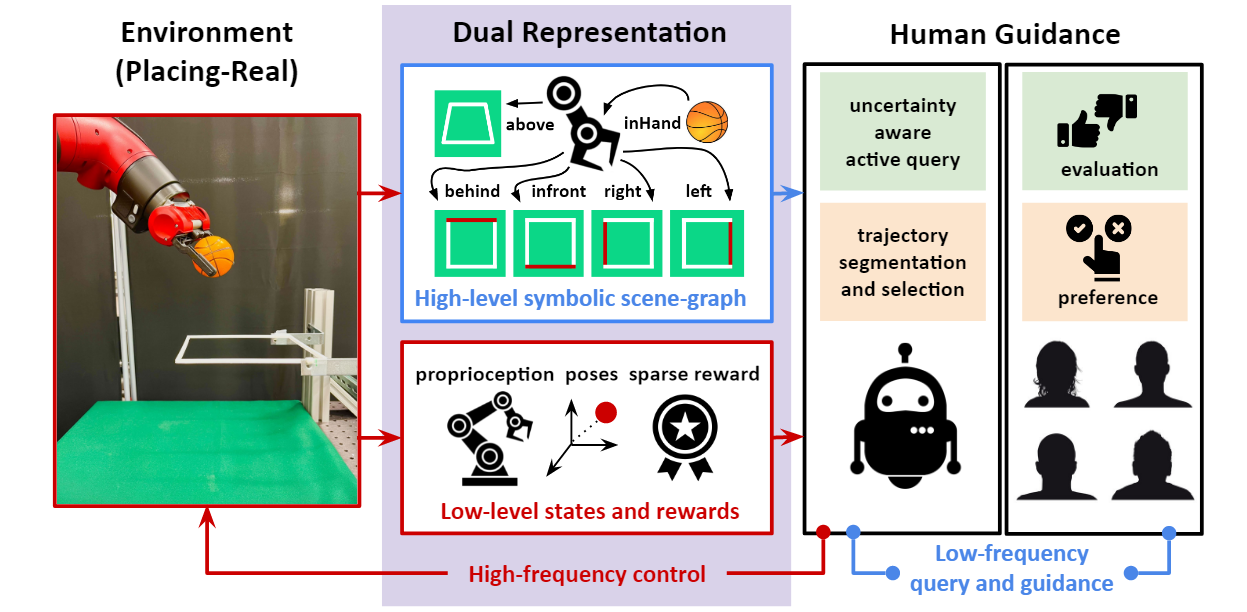
A Dual Representation Framework for Robot Learning with Human Guidance
Contact: zharu@stanford.edu
Links: Paper
Keywords: human guidance, evaluative feedback, preference learning
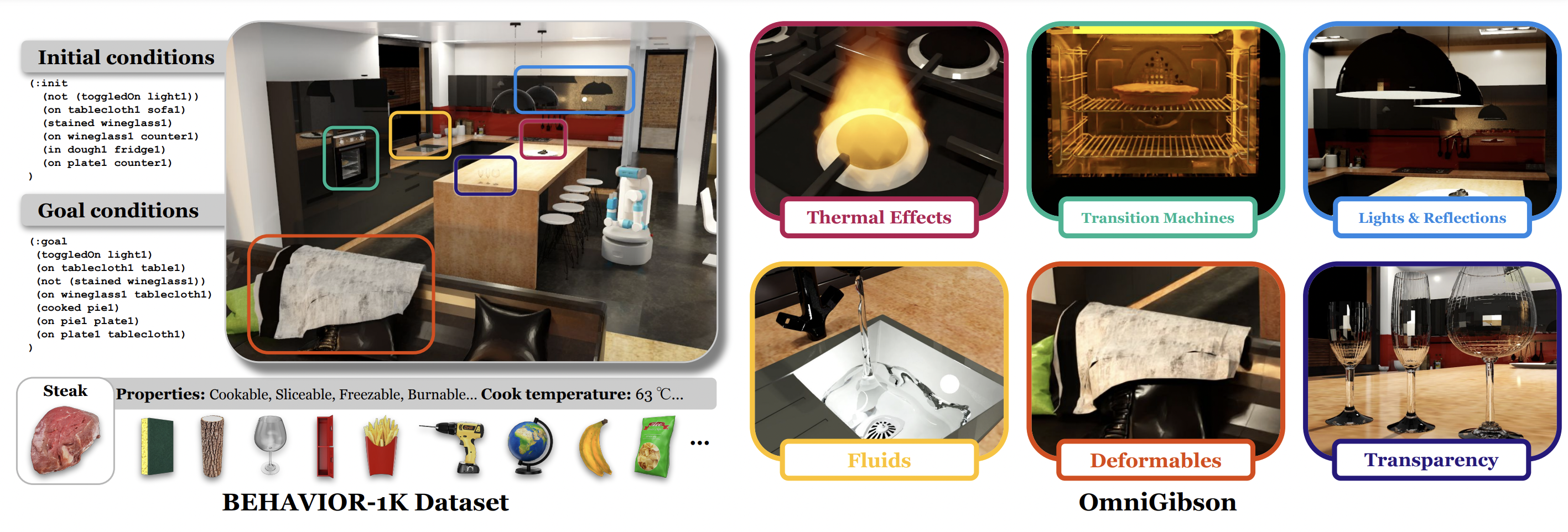
BEHAVIOR-1K: A Benchmark for Embodied AI with 1,000 Everyday Activities and Realistic Simulation
Contact: zharu@stanford.edu
Award nominations: Best paper nomination
Links: Paper | Website
Keywords: embodied ai benchmark, everyday activities, mobile manipulation
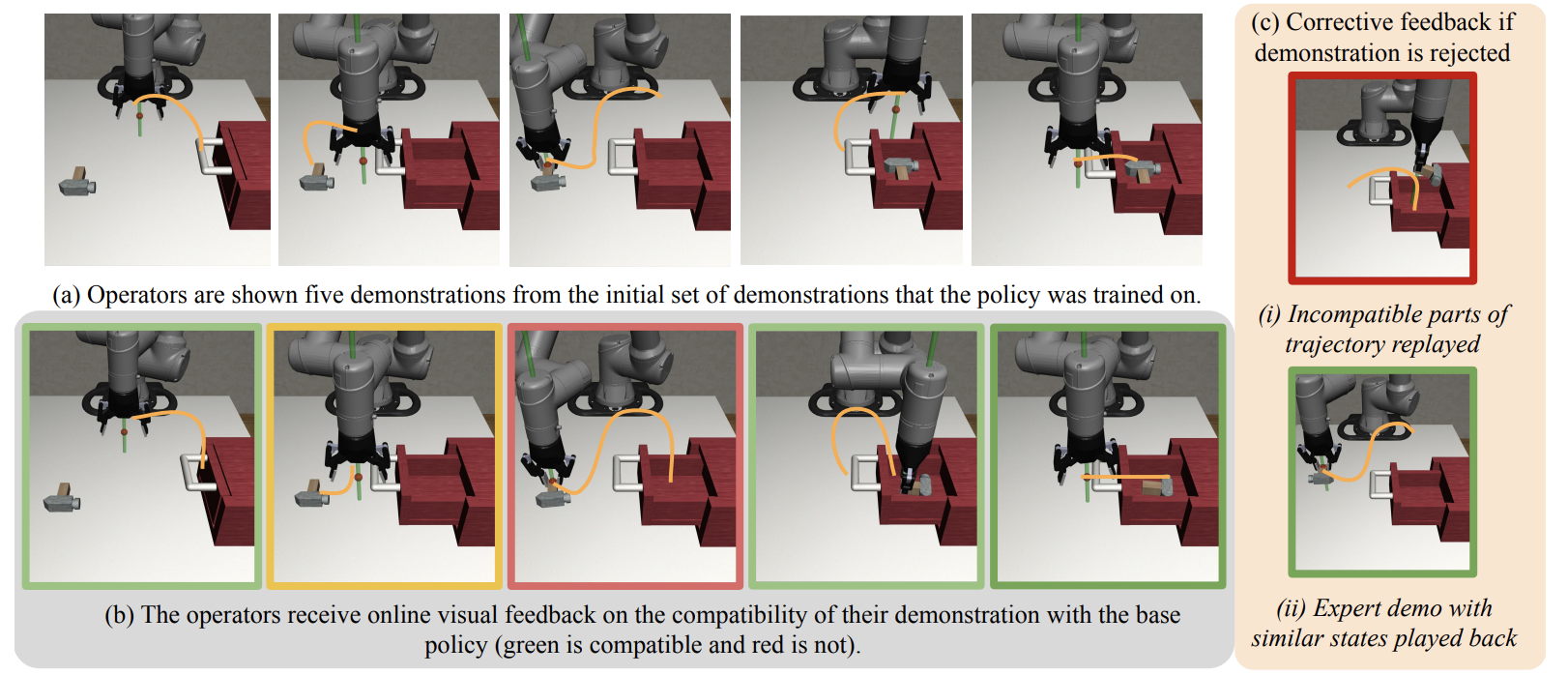
Eliciting Compatible Demonstrations for Multi-Human Imitation Learning
Contact: kanishk.gandhi@stanford.edu
Links: Paper | Website
Keywords: imitation learning, active learning, human-robot interaction
Few-Shot Preference Learning for Human-in-the-Loop Rl
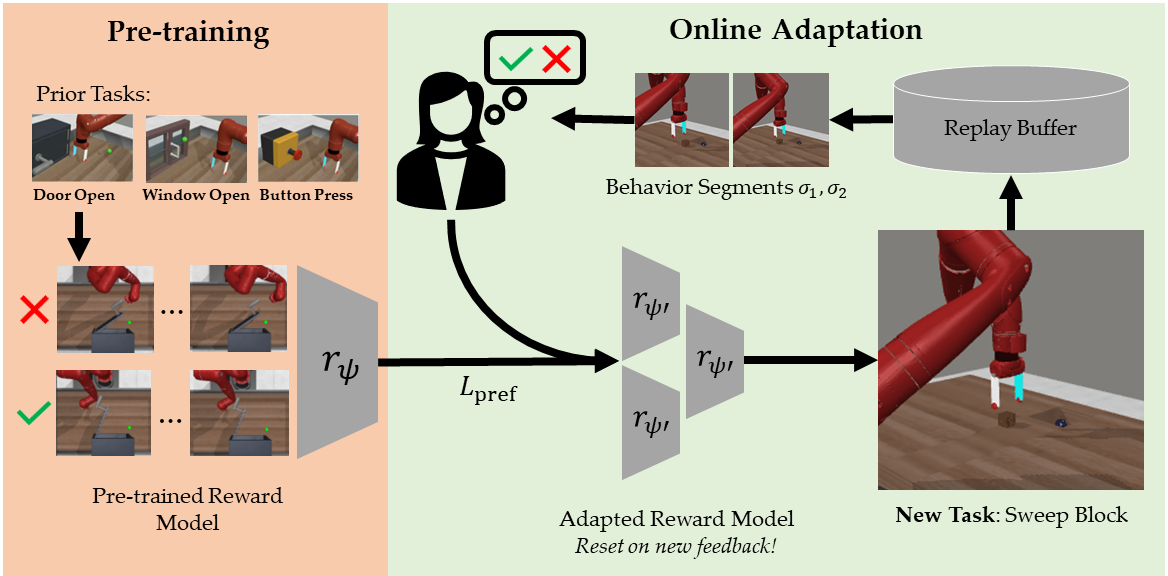
Contact: jhejna@stanford.edu
Links: Paper | Video | Website
Keywords: preference learning, interactive learning, multi-task learning, human-in-the-loop
Interpretable Self-Aware Neural Networks for Robust Trajectory Prediction
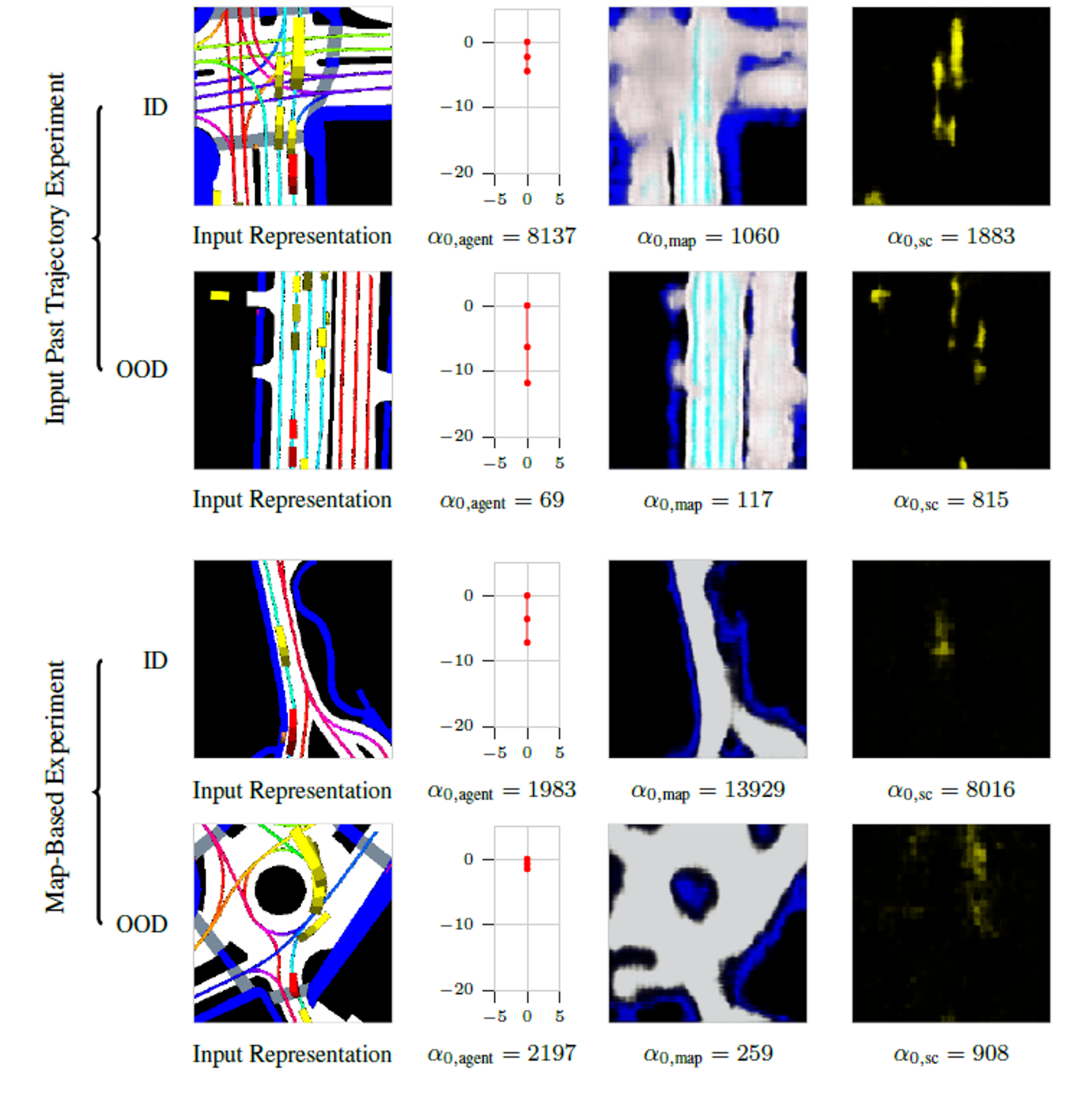
Contact: mitkina@stanford.edu
Links: Paper | Website
Keywords: autonomous vehicles, trajectory prediction, distribution shift
Learning Bimanual Scooping Policies for Food Acquisition
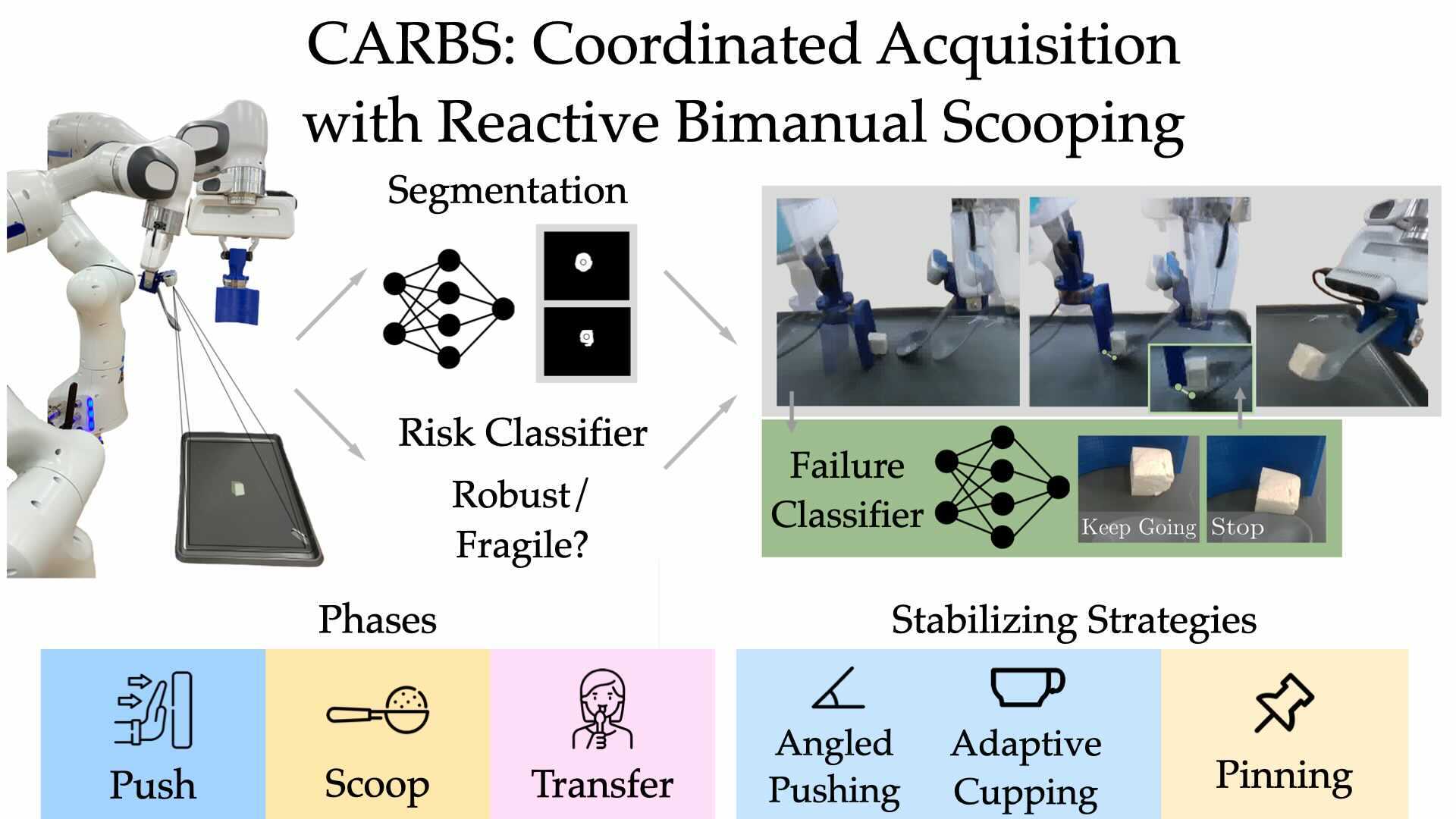
Contact: jgrannen@stanford.edu
Links: Paper | Video | Website
Keywords: bimanual manipulation, food acquisition, robot-assisted feeding, deformable object manipulation
Learning Diverse and Physically Feasible Dexterous Grasps with Generative Model and Bilevel Optimization
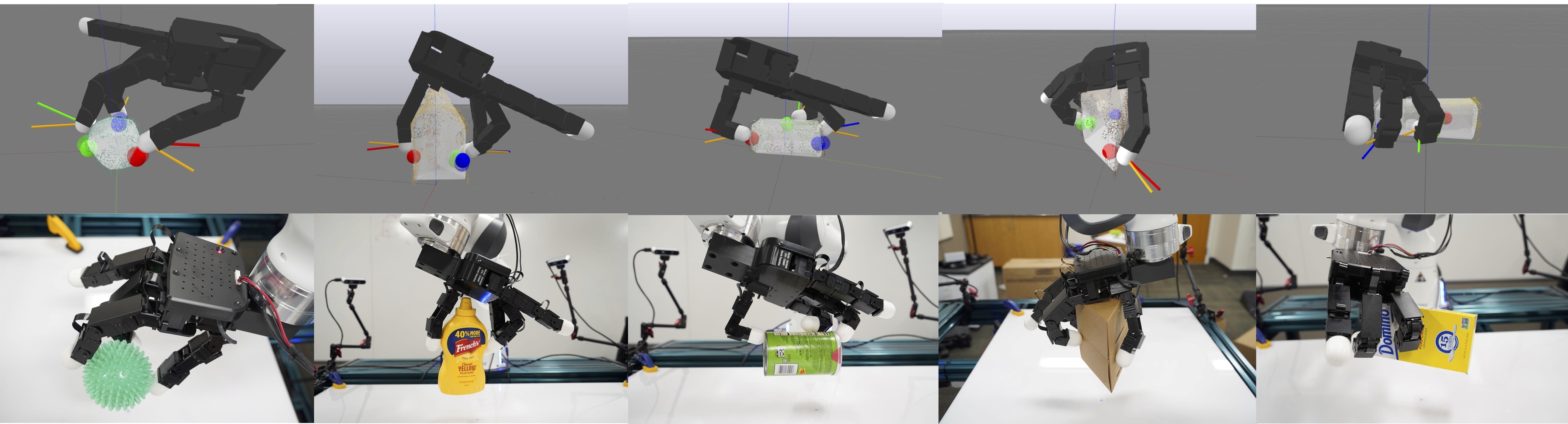
Contact: amhwu@stanford.edu
Links: Paper | Video
Keywords: dexterous grasping, grasp planning, bilevel optimization, generative model
Learning Visuo-Haptic Skewering Strategies for Robot-Assisted Feeding
Contact: priyasun@stanford.edu
Links: Paper | Video
Keywords: manipulation, deformable manipulation, perception, planning, computer vision
Leveraging Haptic Feedback to Improve Data Quality and Quantity for Deep Imitation Learning Models

Contact: ccuan@stanford.edu
Links: Paper
Keywords: haptics and haptic interfaces, imitation learning, data curation
Offline Reinforcement Learning at Multiple Frequencies
Contact: kayburns@stanford.edu
Links: Paper | Video | Website
Keywords: offline reinforcement learning, robotics
R3M: A Universal Visual Representation for Robot Manipulation
Contact: surajn@stanford.edu
Links: Paper | Website
Keywords: visual representation learning, robotic manipulation
See, Hear, Feel: Smart Sensory Fusion for Robotic Manipulation
Contact: rhgao@cs.stanford.edu
Links: Paper | Video | Website
Keywords: multisensory, robot learning, robotic manipulation
We look forward to seeing you at CoRL 2022!