![]()
The International Conference on Intelligent Robots and Systems (IROS) 2022 is being hosted October 23th - 27th. We’re excited to share all the work from SAIL that’s being presented, and you’ll find links to papers, videos and blogs below. Feel free to reach out to the contact authors directly to learn more about the work that’s happening at Stanford!
List of Accepted Papers
Capability-Aware Task Allocation and Team Formation Analysis for Cooperative Exploration of Complex Environments

Contact: ginting@stanford.edu
Keywords: multi-robot task allocation, field robotics
Designing Underactuated Graspers with Dynamically Variable Geometry Using Potential Energy Map Based Analysis

Contact: clyako@stanford.edu
Keywords: underactuated gripper, energy map, dynamically variable geometry
Category-Independent Articulated Object Tracking with Factor Graphs

Contact: heppert@cs.uni-freiburg.de
Links: Paper | Website
Keywords: robotics, 3d tracking, factor graphs
DiffCloud: Real-to-Sim from Point Clouds with Differentiable Simulation and Rendering of Deformable Objects

Contact: priyasun@stanford.edu
Links: Paper | Website
Keywords: deformable manipulation, robot perception, differentiable simulation
FIG-OP: Exploring Large-Scale Unknown Environments on a Fixed Time Budget
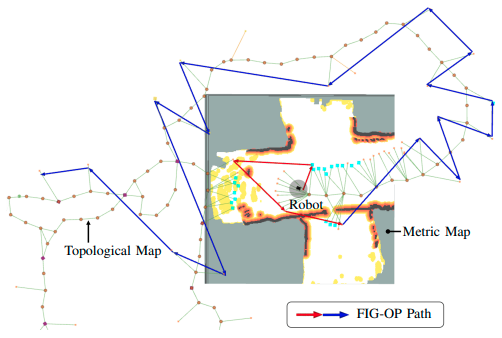
Contact: peltzer@stanford.edu
Links: Paper
Keywords: exploration, navigation, field robotics
How Do We Fail? Stress Testing Perception in Autonomous Vehicles
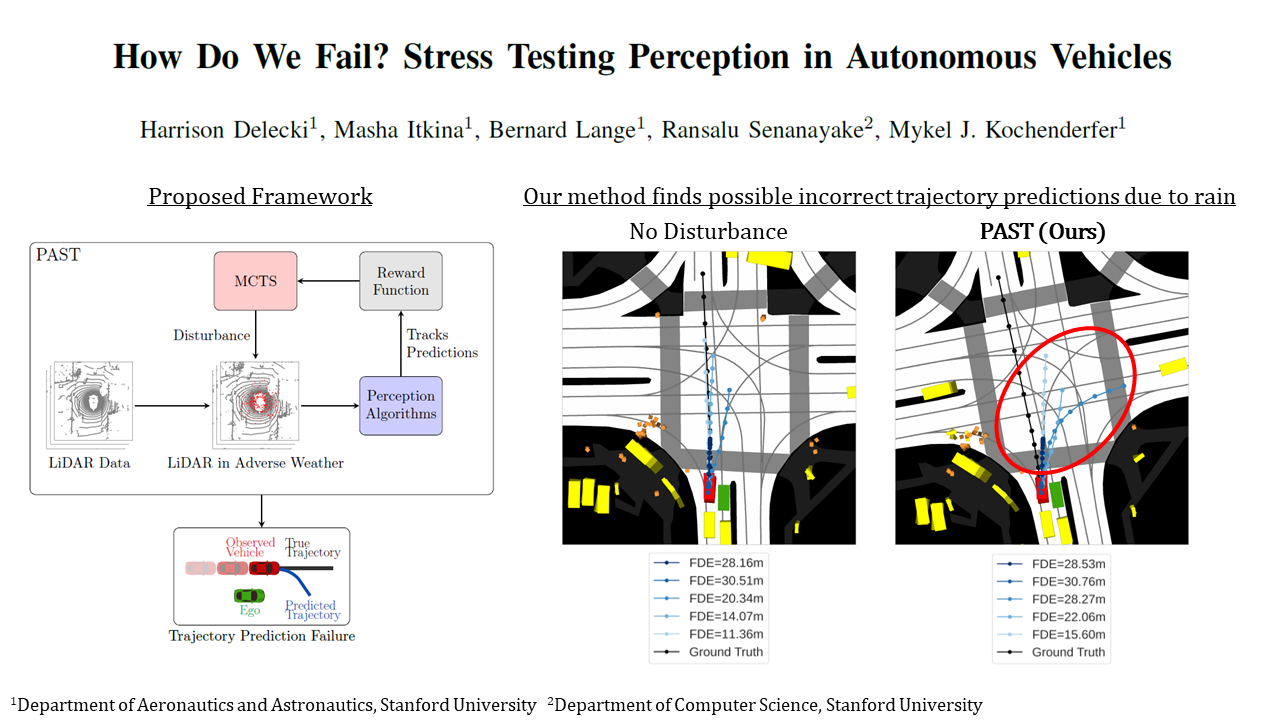
Contact: hdelecki@stanford.edu
Links: Paper
Keywords: ai safety, perception, reinforcement learning
How Do We Fail? Stress Testing Perception in Autonomous Vehicles
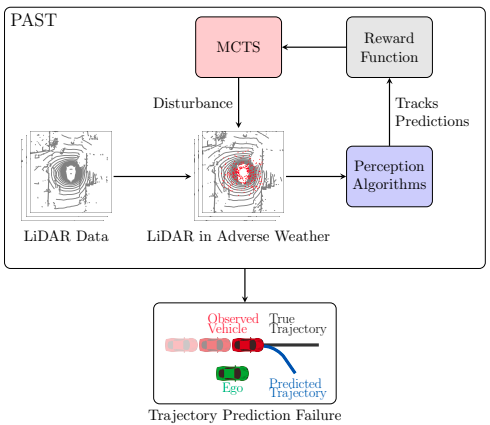
Contact: hdelecki@stanford.edu
Links: Paper | Website
Keywords: failure detection, computer vision, reinforcement learning
On-Device CPU Scheduling for Robot Systems
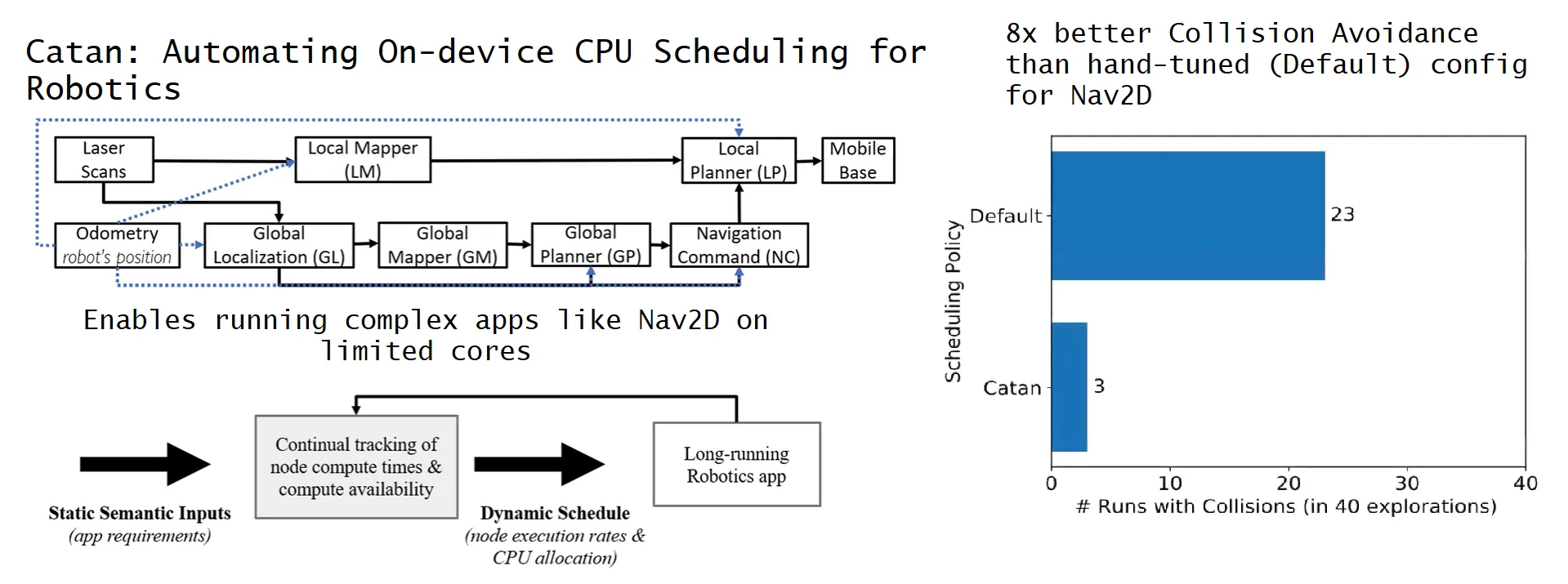
Contact: aditi712@stanford.edu
Links: Paper
Keywords: cpu scheduling, robotics, robot navigation
Renaissance Robot: Optimal Transport Policy Fusion for Learning Diverse Skills
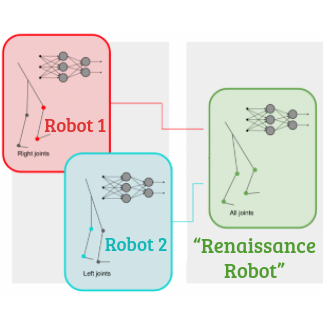
Contact: jtan5838@uni.sydney.edu.au
Links: Paper | Video
Keywords: rl, policy fusion
Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework

Contact: thomas.lew@stanford.edu
Links: Paper
Keywords: safe learning, control, planning, meta-learning
We look forward to seeing you at IROS 2022!