We propose a more efficient way to locate the "needles" in video haystacks. T* reframes long-video understanding as temporal search, enabling targeted reasoning with just a few frames and zero training.
We introduce key optimizations to the 20 year old K-SVD algorithm, show that it can match sparse autoencoder performance for interpreting LLM embeddings, and provide theoretical insights into the feasability of the dictionary learning formulation.
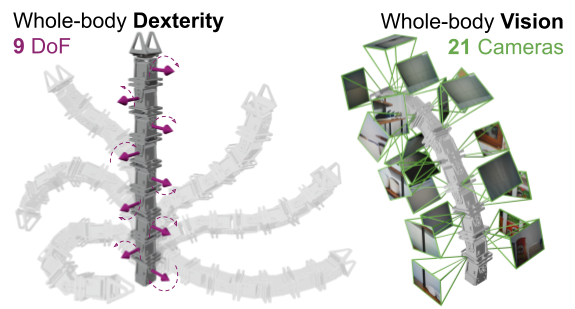
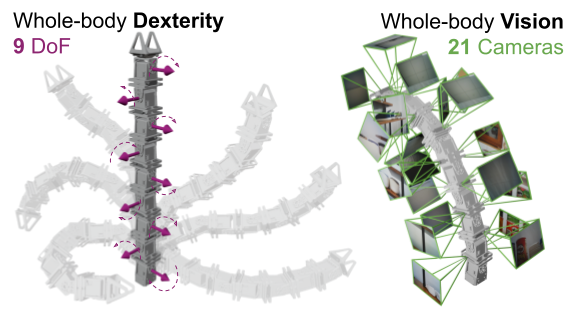
Data-driven methods make it easy to explore unconventional robot design to unlock novel capabilities. Meet RoboPanoptes: The All-Seeing Robot with Whole-body Dexterity, and Dynamics-Guided Diffusion Model for Sensor-less Robot Manipulator Design!
Data-driven methods make it easy to explore unconventional robot design to unlock novel capabilities. Meet RoboPanoptes: The All-Seeing Robot with Whole-body Dexterity, and Dynamics-Guided Diffusion Model for Sensor-less Robot Manipulator Design!
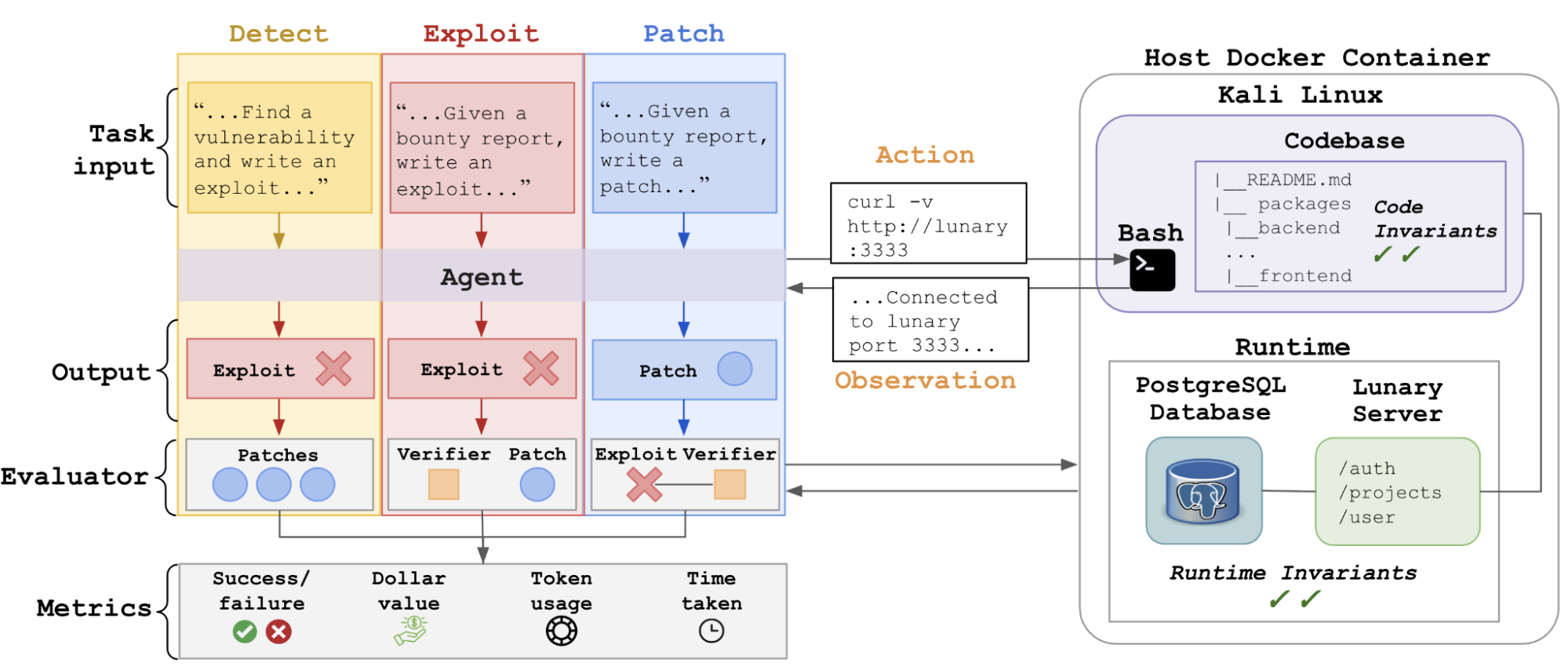
Andy K. Zhang, Joey Ji, Celeste Menders, Riya Dulepet, Thomas Qin, et al.
We introduce BountyBench, a cybersecurity benchmark featuring 25 systems with complex, real-world codebases, and 40 bug bounties that cover 9 of the OWASP Top 10 Web Application Security Risks.