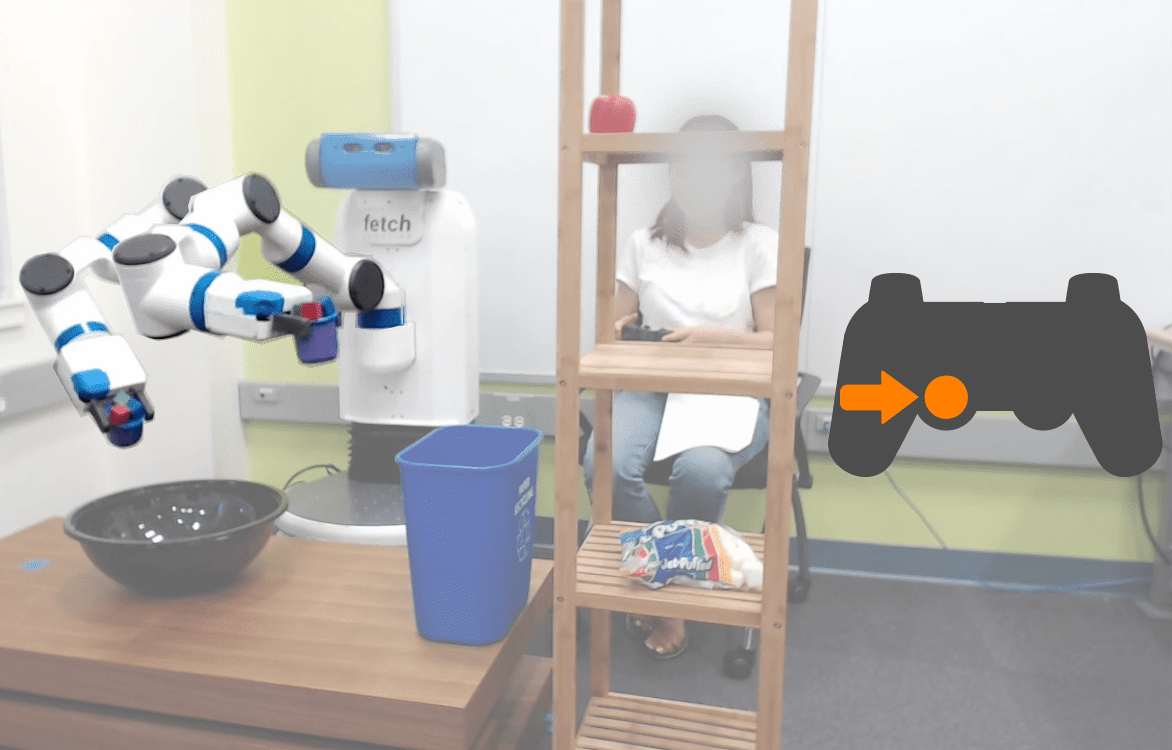
We want to make it easier for humans to teleoperate dexterous robots. We present a learning approach that embeds high-dimensional robot actions into an intuitive, human-controllable, and low-dimensional latent space.
We built a system that enables collecting large-scale robot manipulation datasets with human supervision and used it to collect the largest robot dataset ever collected via teleoperation.
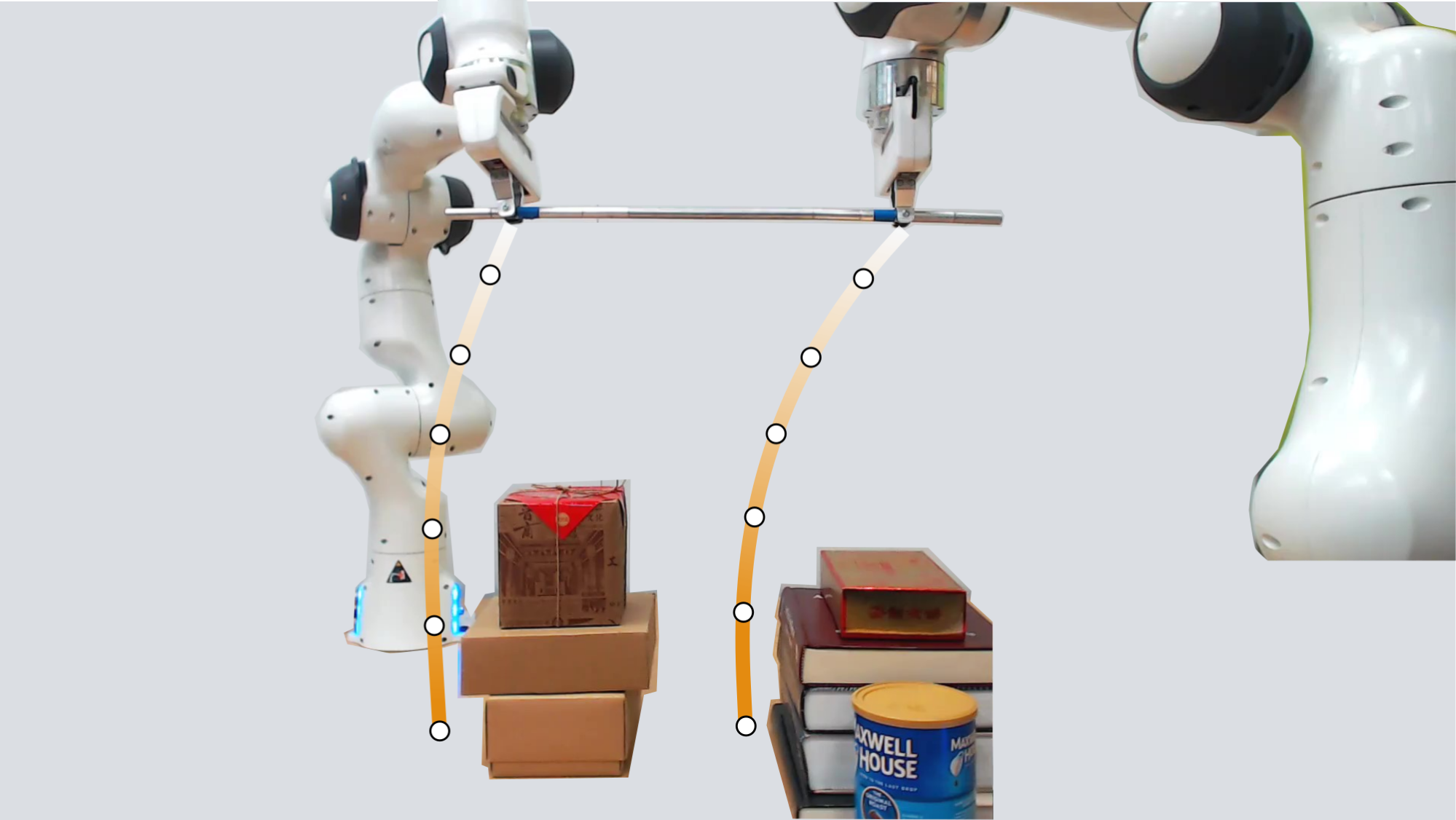
When groups robots work together, their actions communicate valuable information. We introduce a collaborative learning and control strategy that enables robots to harness the information contained within their partner's actions.
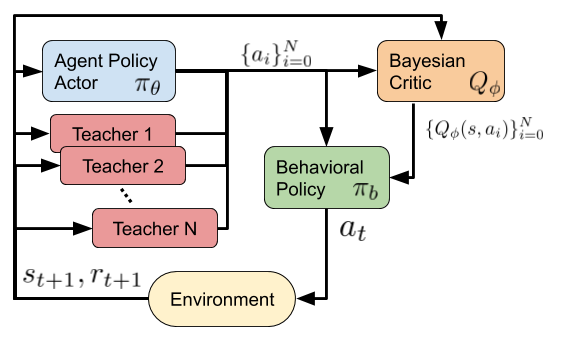
Presenting AC-Teach, a unifying approach to leverage advice from an ensemble of sub-optimal teachers in order to accelerate the learning process of actor-critic reinforcement learning agents.
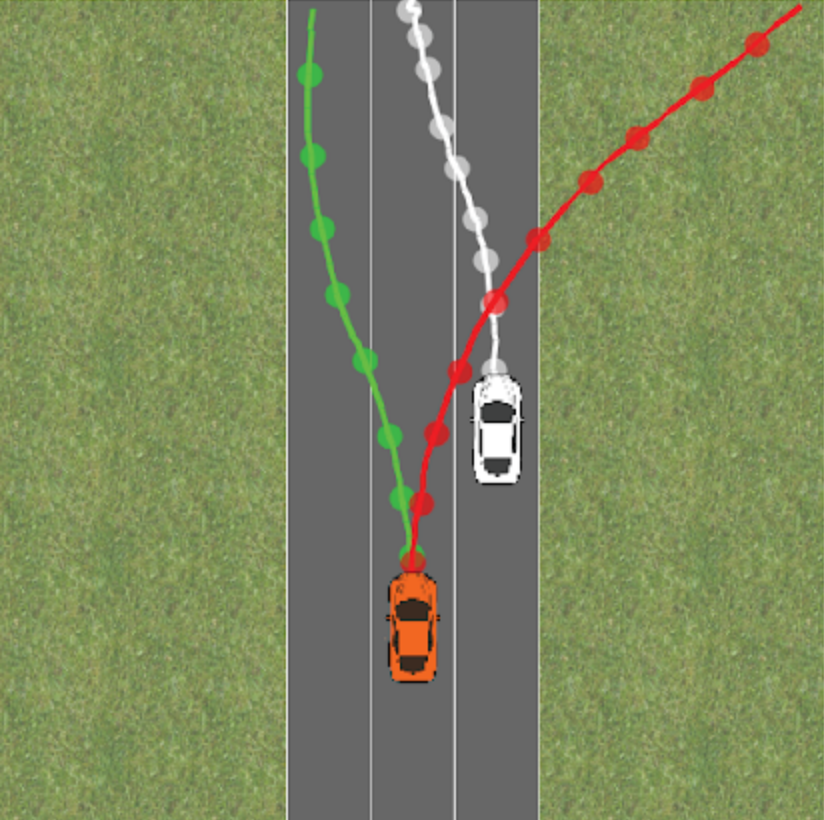
Efficient reward learning is hard. With a focus on preference-based learning methods, we show how sample-efficiency can be achieved along with computational efficiency by using batch-active methods.