#include <sonar_obs.hpp>
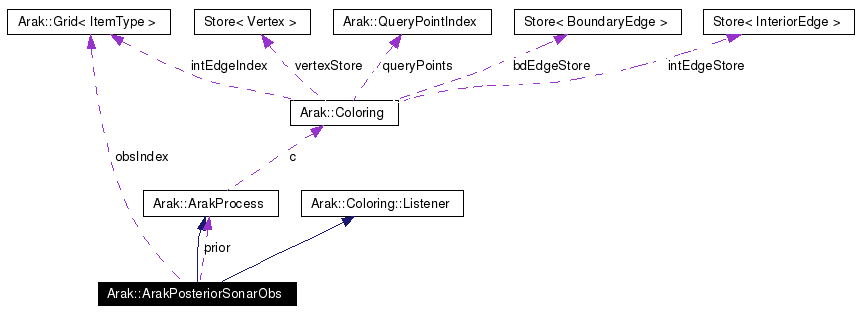
Inheritance diagram for Arak::ArakPosteriorSonarObs:
Definition at line 222 of file sonar_obs.hpp.
Public Member Functions | |
| ArakPosteriorSonarObs (const ArakProcess &prior, const Arak::Util::PropertyMap &props) | |
| Stream constructor. | |
| virtual | ~ArakPosteriorSonarObs () |
| Destructor. | |
| const Geometry::Rectangle & | boundary () const |
| Returns a const reference to a rectangle that encloses the observed data. | |
| virtual double | scale () const |
| Returns the scale of this Arak process. | |
| virtual double | logMeasure () const |
| Computes the (log) measure associated with the Arak process for the coloring. | |
| virtual double | potential () const |
| Computes the potential associated with this posterior Arak process. | |
| virtual void | visualize (CGAL::Qt_widget &widget) const |
| Renders a graphical representation of this Arak posterior using the supplied widget. | |
| virtual void | update (const Geometry::Point &a, const Geometry::Point &b, const Geometry::Point &c) |
| This method recalculates the likelihood of all observations that are out of date and are sensitive to a given triangle. | |
| virtual void | recolored (const Geometry::Point &a, const Geometry::Point &b, const Geometry::Point &c) |
| This method is invoked to inform this process that the triangle with the supplied vertices has been recolored. | |
| virtual void | recolored (const Geometry::Point &a, const Geometry::Point &b, const Geometry::Point &c, const Geometry::Point &d) |
| This method is invoked to inform this process that the quadrilateral with the supplied vertices has been recolored. | |
| double | returnProb (const SonarImpact &impact) const |
| Computes the probability of obtaining a sonar return given the location and orientation of the sensor and the position of the impact face. | |
| double | distLikelihood (const SonarImpact &impact, const double obs) const |
| Returns the likelihood of obtaining an observed sonar range given a true sonar impact. | |
| template<typename ImpactIterator> double | likelihood (double range, ImpactIterator begin, ImpactIterator end) const |
| Computes the likelihood of a sonar range reading given a set of true sonar impacts. | |
Protected Types | |
| typedef PointerHandle< SonarObs > | SonarObsHandle |
| typedef Grid< SonarObsHandle > | SonarObsIndex |
| A grid where each cell stores handles to all observations whose cones intersect the cell's boundary. | |
Protected Member Functions | |
| double | updateObsLP (SonarObs &o, bool init=false) const |
| Updates the log probability of the supplied observation under the current coloring and process parameters. | |
Protected Attributes | |
| const ArakProcess & | prior |
| The prior process. | |
| std::vector< SonarObs * > | obs |
| An array of the observations. | |
| SonarObsIndex * | obsIndex |
| An index of the observations. | |
| unsigned long int | updateId |
| The update sequence number. | |
| double | aperture |
| The width of the sonar cones (in radians). | |
| double | maxRange |
| This is the sonar measurement obtained when the sensor does not impact a surface. | |
| double | prob_max_range |
| The probability of obtaining a max-range measurement given the reading is not generated by a sonar contact. | |
| double | unif_outlier_weight |
| The weight of a uniform model for outlier measurements. | |
| double | exp_outlier_coef |
| The parameter of an exponential model for outlier measurements. | |
| double | face_const_coef |
| The constant coefficient (or bias) of the logistic return probability model for face features. | |
| double | face_proj_angle_coef |
| The coefficient of the projection angle term in the logistic return probability model for face features. | |
| double | face_min_range_coef |
| The coefficient of the minimum range term in the logistic return probability model for face features. | |
| double | face_vis_angle_coef |
| The coefficient of the visible angle term in the logistic return probability model for face features. | |
| double | corner_const_coef |
| The constant coefficient (or bias) of the logistic return probability model for corner features. | |
| double | corner_range_coef |
| The coefficient of the range term in the logistic return probability model for corner features. | |
| double | faceRelErrStDev |
| The standard deviation in sonar face range measurements, expressed as relative error. | |
| double | cornerRelErrStDev |
| The standard deviation in sonar corner range measurements, expressed as relative error. | |
| double | lp |
| The current potential arising from observations. | |
|
|
Definition at line 228 of file sonar_obs.hpp. Referenced by update(), and updateObsLP(). |
|
|
A grid where each cell stores handles to all observations whose cones intersect the cell's boundary.
Definition at line 234 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(). |
|
||||||||||||
|
Stream constructor. The observations are read from a file of numbers with the following format:
Definition at line 198 of file sonar_obs.cpp. References Arak::Coloring::addListener(), Arak::Coloring::addQueryPoints(), aperture, Arak::Coloring::boundary(), corner_const_coef, corner_range_coef, cornerRelErrStDev, exp_outlier_coef, face_const_coef, face_min_range_coef, face_proj_angle_coef, face_vis_angle_coef, faceRelErrStDev, Arak::ArakProcess::getColoring(), Arak::Geometry::Point, prob_max_range, Arak::Util::PropertyMap, Arak::Geometry::Rectangle, SonarObsIndex, unif_outlier_weight, and updateObsLP(). |
|
|
Destructor.
Definition at line 379 of file sonar_obs.cpp. |
|
|
Returns a const reference to a rectangle that encloses the observed data.
Definition at line 473 of file sonar_obs.hpp. References Arak::Grid< ItemType >::boundary(), and Arak::Geometry::Rectangle. |
|
||||||||||||
|
Returns the likelihood of obtaining an observed sonar range given a true sonar impact. This model is a Gaussian model with multiplicative noise.
Definition at line 591 of file sonar_obs.hpp. References cornerRelErrStDev, faceRelErrStDev, Arak::SonarImpact::isCorner(), and Arak::SonarImpact::min_range. Referenced by likelihood(). |
|
||||||||||||||||||||
|
Computes the likelihood of a sonar range reading given a set of true sonar impacts.
Definition at line 606 of file sonar_obs.hpp. References distLikelihood(), exp_outlier_coef, prob_max_range, returnProb(), and unif_outlier_weight. Referenced by updateObsLP(). |
|
|
Computes the (log) measure associated with the Arak process for the coloring. (This is actually multiplied by an elementary Poisson measure over the vertex locations to yield the coloring measure.)
Implements Arak::ArakProcess. Definition at line 371 of file sonar_obs.cpp. References Arak::ArakProcess::logMeasure(). |
|
|
Computes the potential associated with this posterior Arak process.
Implements Arak::ArakProcess. Definition at line 375 of file sonar_obs.cpp. References Arak::ArakProcess::potential(). |
|
||||||||||||||||||||
|
This method is invoked to inform this process that the quadrilateral with the supplied vertices has been recolored. The vertices are supplied in either clockwise or counter-clockwise order. Note that this quadrilateral is simple, but not necessarily convex.
Reimplemented from Arak::Coloring::Listener. Definition at line 466 of file sonar_obs.cpp. References Arak::Geometry::Point, and update(). |
|
||||||||||||||||
|
This method is invoked to inform this process that the triangle with the supplied vertices has been recolored.
Reimplemented from Arak::Coloring::Listener. Definition at line 459 of file sonar_obs.cpp. References Arak::Geometry::Point, and update(). |
|
|
Computes the probability of obtaining a sonar return given the location and orientation of the sensor and the position of the impact face. The returned probability is given by the following logistic model:
where
Definition at line 569 of file sonar_obs.hpp. References corner_const_coef, corner_range_coef, face_const_coef, face_min_range_coef, face_proj_angle_coef, face_vis_angle_coef, Arak::SonarImpact::isCorner(), Arak::SonarImpact::min_range, Arak::SonarImpact::proj_angle, and Arak::SonarImpact::visible_angle. Referenced by likelihood(). |
|
|
Returns the scale of this Arak process.
Implements Arak::ArakProcess. Definition at line 480 of file sonar_obs.hpp. References Arak::ArakProcess::scale(). |
|
||||||||||||||||
|
This method recalculates the likelihood of all observations that are out of date and are sensitive to a given triangle.
Definition at line 433 of file sonar_obs.cpp. References Arak::Geometry::Point, SonarObsHandle, Arak::Geometry::Triangle, and updateObsLP(). Referenced by recolored(). |
|
||||||||||||
|
Updates the log probability of the supplied observation under the current coloring and process parameters. The change in its log probability is returned. Definition at line 291 of file sonar_obs.cpp. References Arak::BLACK, Arak::Coloring::color(), Arak::computeFirstSonarImpact(), Arak::computeSonarImpacts(), cornerRelErrStDev, Arak::ArakPosteriorSonarObs::SonarObs::entries, faceRelErrStDev, likelihood(), Arak::ln(), Arak::ArakPosteriorSonarObs::SonarObs::lp, Arak::ArakPosteriorSonarObs::SonarObs::max, Arak::ArakPosteriorSonarObs::SonarObs::min, Arak::SonarImpact::min_range, Arak::outerApprox(), Arak::ArakPosteriorSonarObs::SonarObs::range, Arak::ArakPosteriorSonarObs::SonarObs::relevantRegion, SonarObsHandle, Arak::ArakPosteriorSonarObs::SonarObs::source, Arak::ArakPosteriorSonarObs::SonarObs::unused, and Arak::ArakPosteriorSonarObs::SonarObs::updateId. Referenced by ArakPosteriorSonarObs(), and update(). |
|
|
Renders a graphical representation of this Arak posterior using the supplied widget. The Gaussian observations are rendered as disks of varying gray level.
Reimplemented from Arak::ArakProcess. Definition at line 386 of file sonar_obs.cpp. References Arak::jet_colors, Arak::jet_size, Arak::ArakPosteriorSonarObs::SonarObs::lp, Arak::ArakPosteriorSonarObs::SonarObs::max, Arak::ArakPosteriorSonarObs::SonarObs::min, Arak::Geometry::Point, Arak::ArakPosteriorSonarObs::SonarObs::range, Arak::Geometry::Segment, Arak::ArakPosteriorSonarObs::SonarObs::source, and Arak::Geometry::Vector. |
|
|
The width of the sonar cones (in radians).
Definition at line 353 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(). |
|
|
The constant coefficient (or bias) of the logistic return probability model for corner features.
Definition at line 405 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and returnProb(). |
|
|
The coefficient of the range term in the logistic return probability model for corner features.
Definition at line 411 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and returnProb(). |
|
|
The standard deviation in sonar corner range measurements, expressed as relative error.
For example, a value of 0.01 would signify that the standard deviation of range measurements to a corner at range Definition at line 427 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), distLikelihood(), and updateObsLP(). |
|
|
The parameter of an exponential model for outlier measurements.
Definition at line 375 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and likelihood(). |
|
|
The constant coefficient (or bias) of the logistic return probability model for face features.
Definition at line 381 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and returnProb(). |
|
|
The coefficient of the minimum range term in the logistic return probability model for face features.
Definition at line 393 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and returnProb(). |
|
|
The coefficient of the projection angle term in the logistic return probability model for face features.
Definition at line 387 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and returnProb(). |
|
|
The coefficient of the visible angle term in the logistic return probability model for face features.
Definition at line 399 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and returnProb(). |
|
|
The standard deviation in sonar face range measurements, expressed as relative error.
For example, a value of 0.01 would signify that the standard deviation of range measurements to a surface at range Definition at line 419 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), distLikelihood(), and updateObsLP(). |
|
|
The current potential arising from observations.
Definition at line 432 of file sonar_obs.hpp. |
|
|
This is the sonar measurement obtained when the sensor does not impact a surface.
Definition at line 359 of file sonar_obs.hpp. |
|
|
An array of the observations.
Definition at line 338 of file sonar_obs.hpp. |
|
|
An index of the observations.
Definition at line 343 of file sonar_obs.hpp. |
|
|
The prior process.
Definition at line 333 of file sonar_obs.hpp. |
|
|
The probability of obtaining a max-range measurement given the reading is not generated by a sonar contact.
Definition at line 365 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and likelihood(). |
|
|
The weight of a uniform model for outlier measurements.
Definition at line 370 of file sonar_obs.hpp. Referenced by ArakPosteriorSonarObs(), and likelihood(). |
|
|
The update sequence number.
Definition at line 348 of file sonar_obs.hpp. |
 1.3.6
1.3.6
![\[ p = \frac{1}{1 + \exp \left\{ a + b \log \sin \theta + cr + d\phi \right\}} \]](form_74.png)
 is the impact's projection angle,
is the impact's projection angle,  is the impact's minimum range,
is the impact's minimum range,  is the impact's visible angle,
is the impact's visible angle,  ,
,  ,
,  and
and  are model parameters.
are model parameters. .
.