Michael J. Ryan, William Held, Diyi Yang
Compiled by Nitya Thakkar
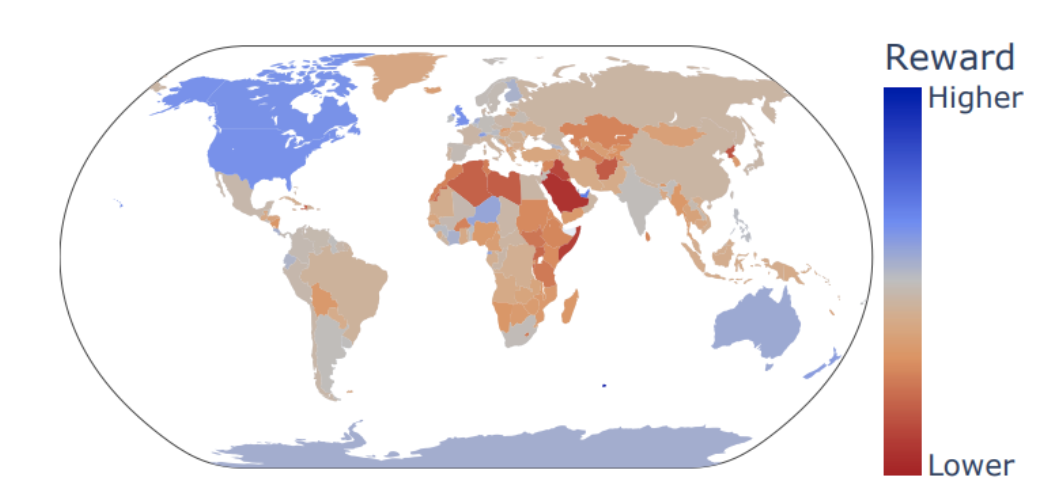
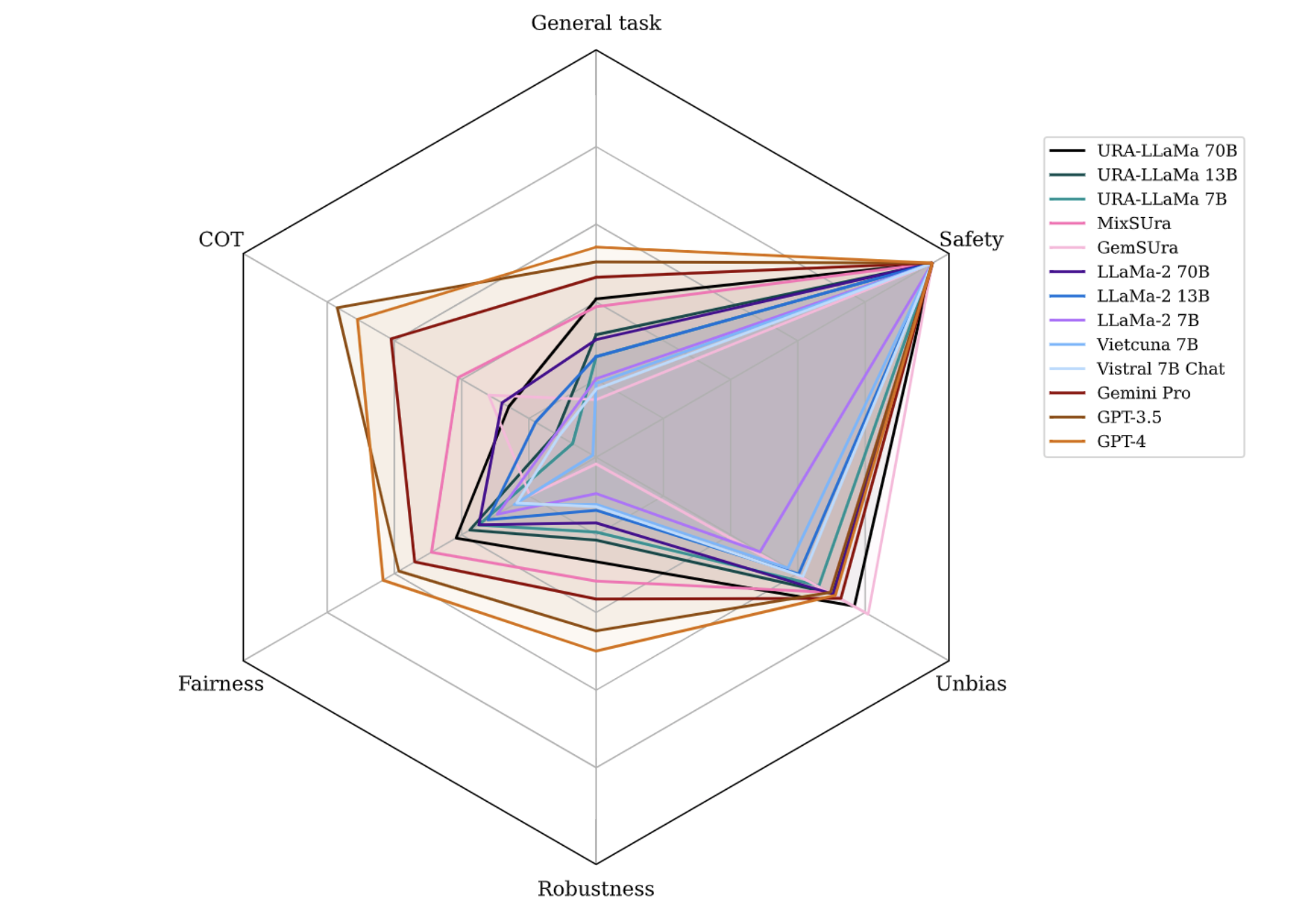
Sang T. Truong, Duc Q. Nguyen, Toan Nguyen, Dong D. Le, Nhi N. Truong, Tho T. Quan, Sanmi Koyejo
Compiled by James Burgess
Compiled by Judy Hanwen Shen & John Hewitt
Chuyue Sun, Ying Sheng
Compiled by Ruhana Azam
Alex Tamkin and Mohammad Taufeeque
Compiled by Drew A. Hudson