|
Ajay U. Mandlekar – Publications
For a complete list please see Google Scholar.
PhD Thesis
Building Robot Intelligence by Scaling Human Supervision
[pdf] [video]
Preprints
 |
DexMachina: Functional Retargeting for Bimanual Dexterous Manipulation
Mandi Zhao, Yifan Hou, Dieter Fox, Yashraj Narang, Ajay Mandlekar*, Shuran Song*
Under Review
[pdf] [website] [code]
|
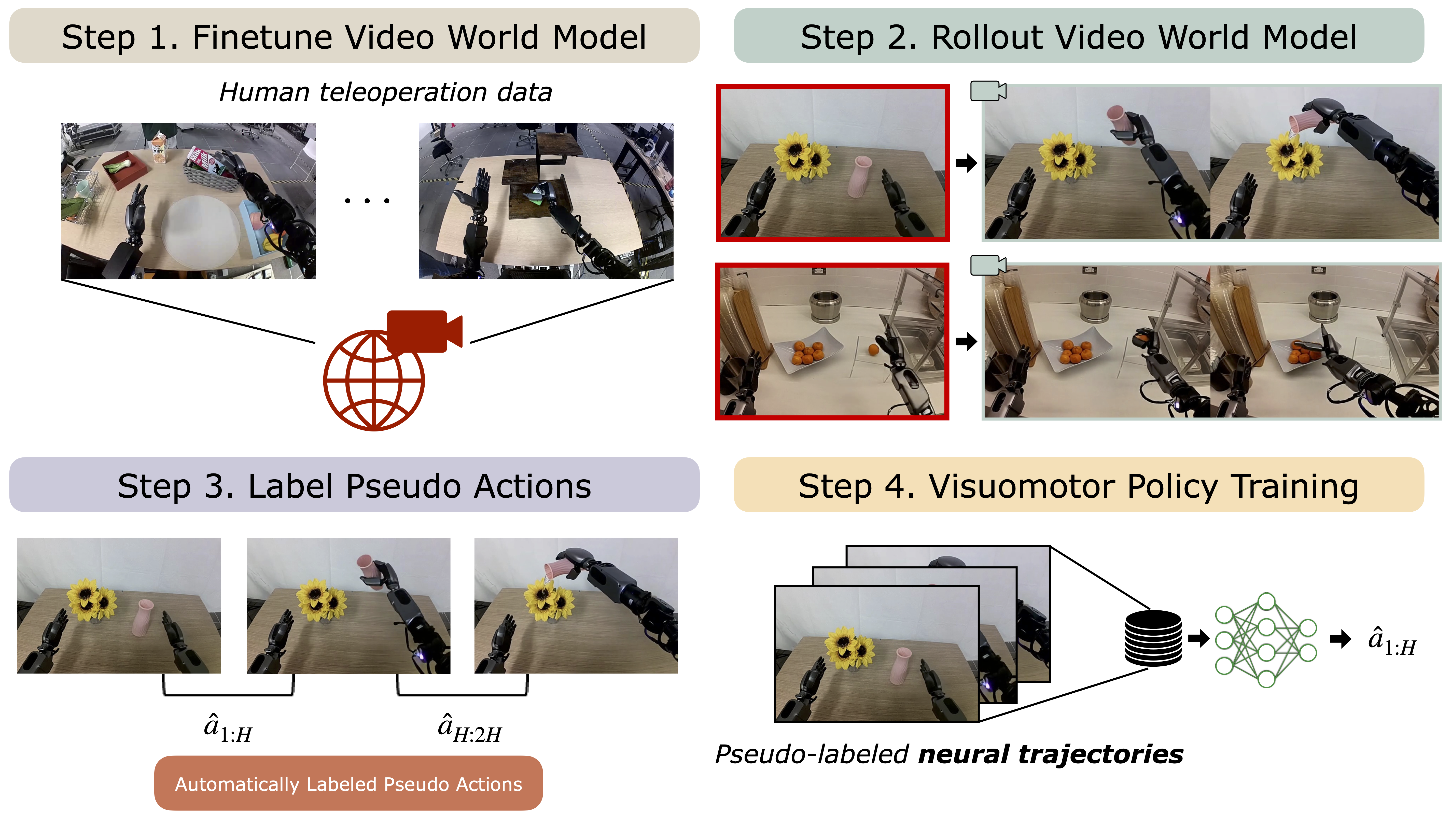 |
DreamGen: Unlocking Generalization in Robot Learning through Video World Models
Joel Jang*, Seonghyeon Ye*, Zongyu Lin*, Jiannan Xiang*, Johan Bjorck, Yu Fang, Fengyuan Hu, Spencer Huang, Kaushil Kundalia, Yen-Chen Lin, Loic Magne, Ajay Mandlekar, Avnish Narayan, You Liang Tan, Guanzhi Wang, Jing Wang, Qi Wang, Yinzhen Xu, Xiaohui Zeng, Kaiyuan Zheng, Ruijie Zheng, Ming-Yu Liu, Luke Zettlemoyer, Dieter Fox, Jan Kautz, Scott Reed*, Yuke Zhu*, Linxi Fan*
Under Review
[pdf] [website code]
|
Publications
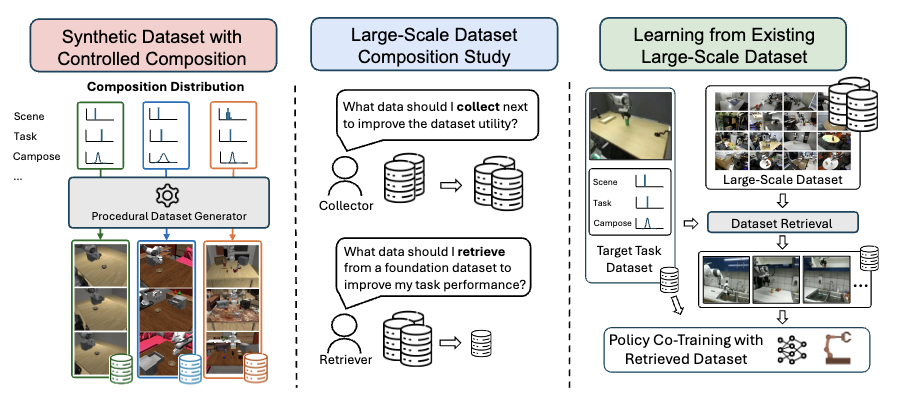 |
What Matters in Learning from Large-Scale Datasets for Robot Manipulation
Vaibhav Saxena, Matthew Bronars*, Nadun Ranawaka Arachchige*, Kuancheng Wang, Woo Chul Shin, Soroush Nasiriany, Ajay Mandlekar*, Danfei Xu*
ICLR 2025
[pdf [website] [code]
|
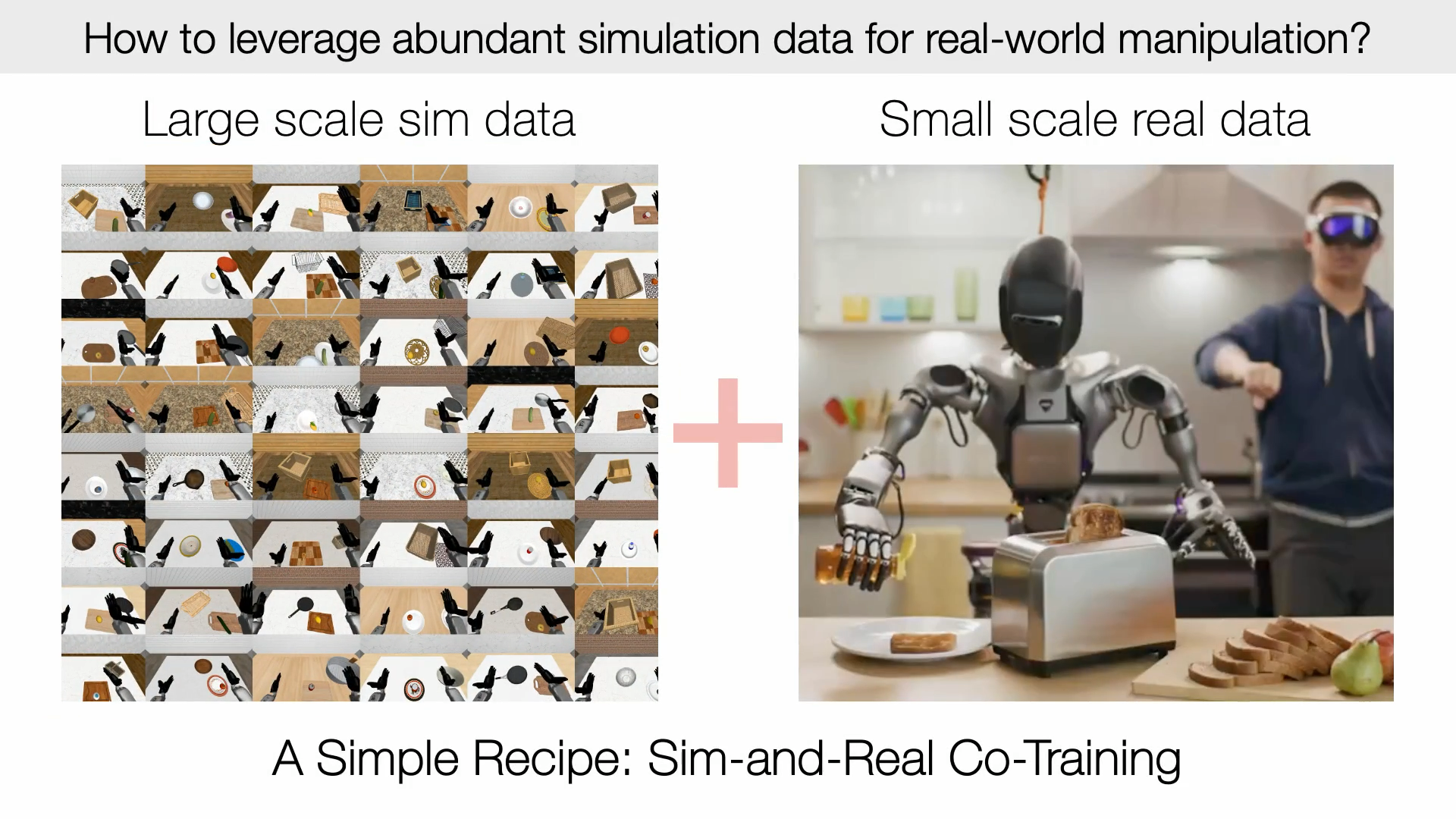 |
Sim-and-Real Co-Training: A Simple Recipe for Vision-Based Robotic Manipulation
Abhiram Maddukuri*, Zhenyu Jiang*, Lawrence Yunliang Chen*, Soroush Nasiriany*, Yuqi Xie, Yu Fang, Wenqi Huang, Zu Wang, Zhenjia Xu, Nikita Chernyadev, Scott Reed, Ken Goldberg, Ajay Mandlekar*, Linxi Fan*, Yuke Zhu*
RSS 2025
[pdf] [website]
|
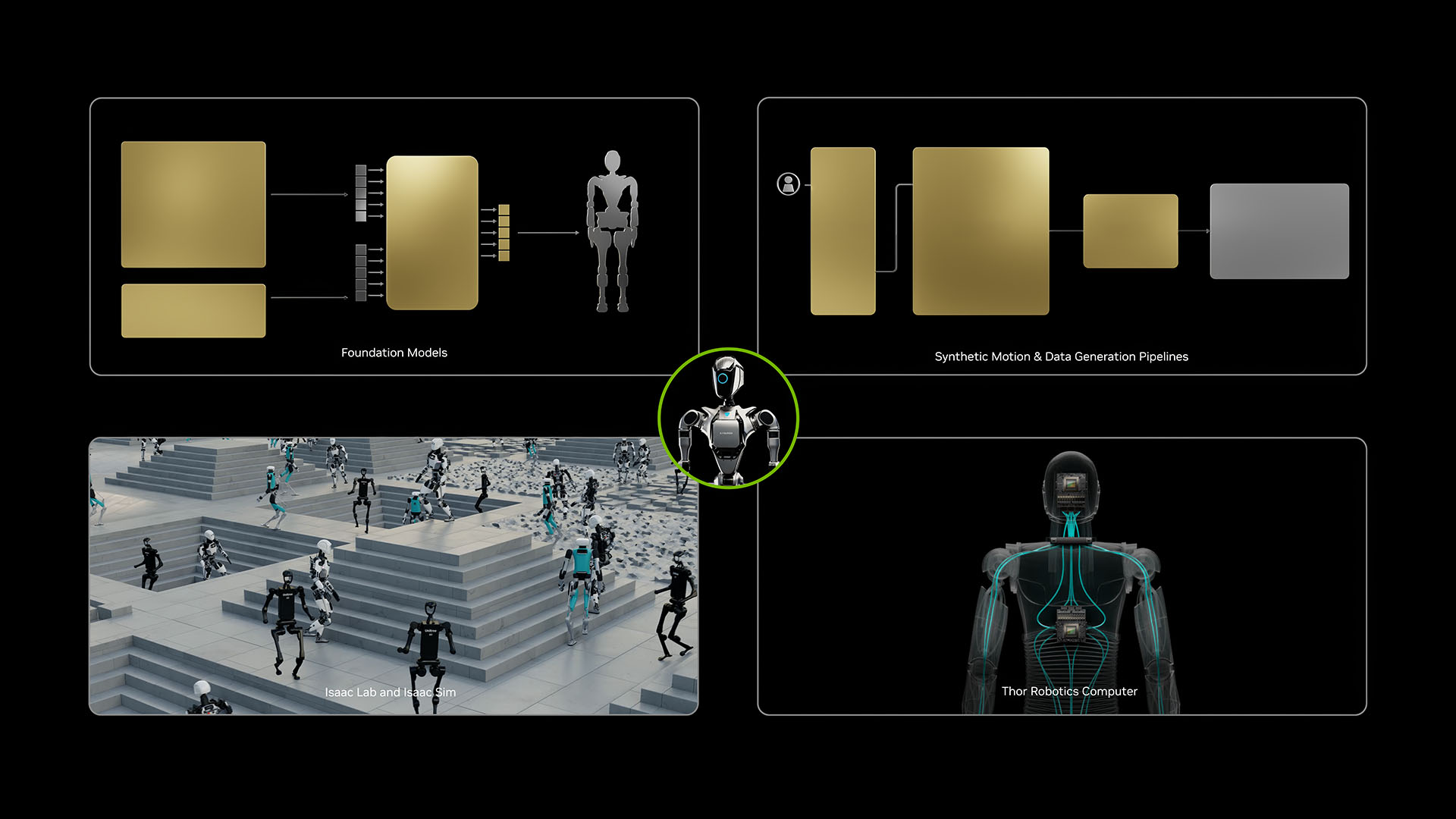 |
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
NVIDIA
Technical Report 2025
[pdf] [website] [code]
|
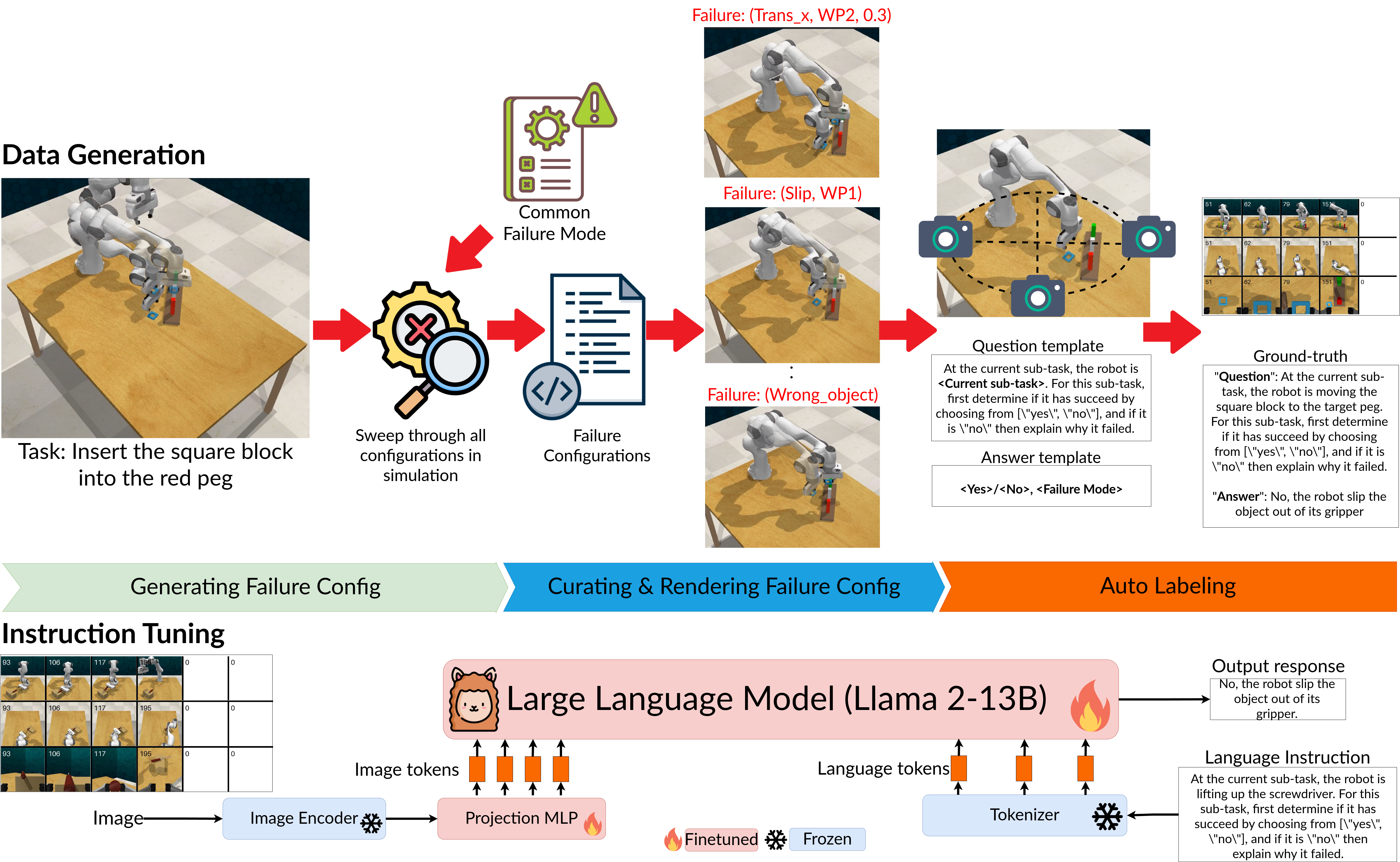 |
AHA: A Vision-Language-Model for Detecting and Reasoning Over Failures in Robotic Manipulation
Jiafei Duan, Wilbert Pumacay, Nishanth Kumar, Yi Ru Wang, Shulin Tian, Wentao Yuan, Ranjay Krishna, Dieter Fox, Ajay Mandlekar*, Yijie Guo*
ICLR 2025
[pdf] [website] [code]
|
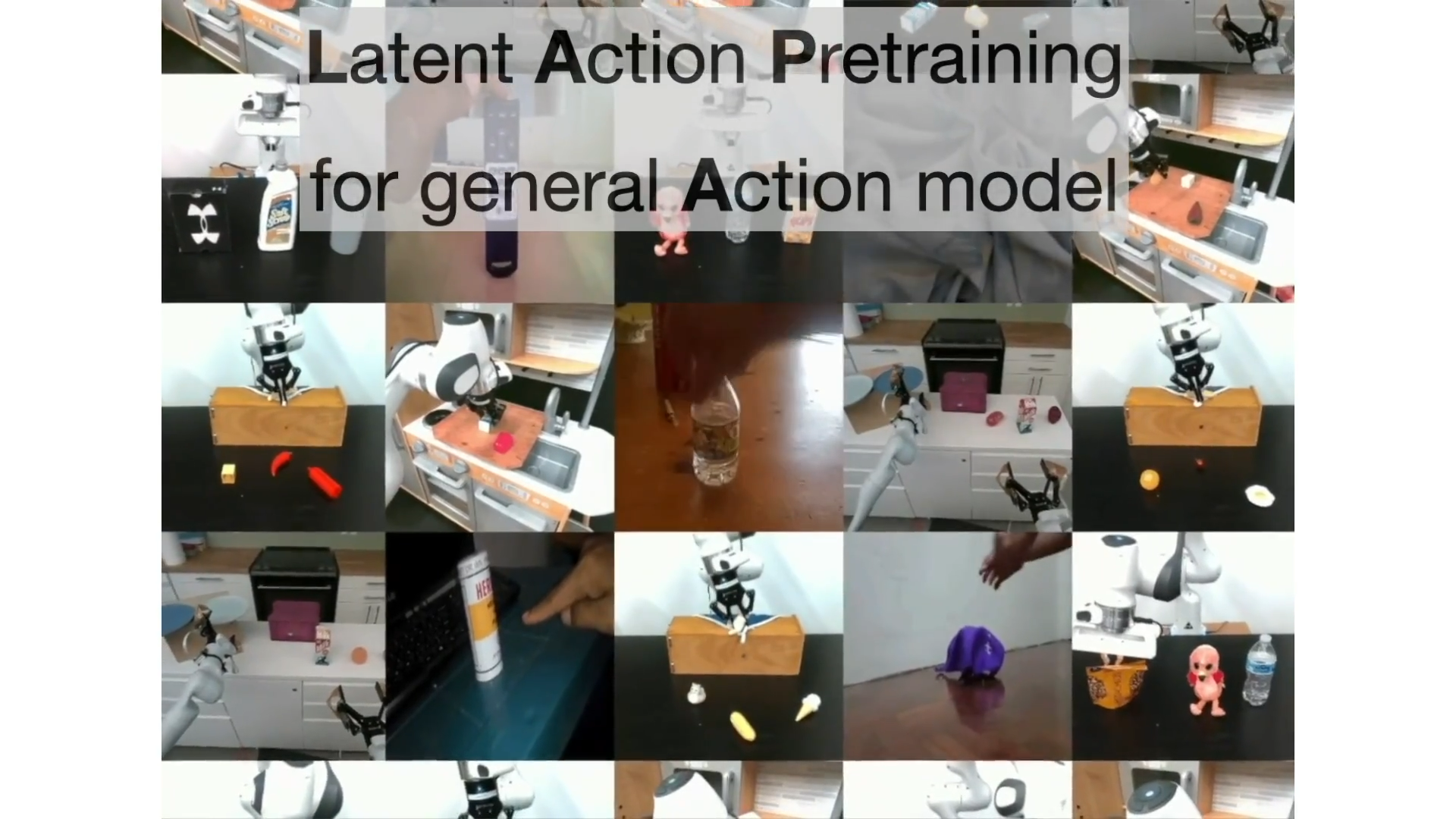 |
Latent Action Pretraining from Videos
Seonghyeon Ye*, Joel Jang*, Byeongguk Jeon, Sejune Joo, Jianwei Yang, Baolin Peng, Ajay Mandlekar, Reuben Tan, Yu-Wei Chao, Bill Yuchen Lin, Lars Liden, Kimin Lee*, Jianfeng Gao*, Luke Zettlemoyer*, Dieter Fox*, Minjoon Seo*
ICLR 2025
Best Paper Award at CoRL 2024 LangRob Workshop
[pdf] [website] [code]
|
 |
DexMimicGen: Automated Data Generation for Bimanual Dexterous Manipulation via Imitation Learning
Zhenyu Jiang*, Yuqi Xie*, Kevin Lin*, Zhenjia Xu, Weikang Wan, Ajay Mandlekar*, Linxi Fan*, Yuke Zhu*
ICRA 2025
[pdf] [website] [code]
|
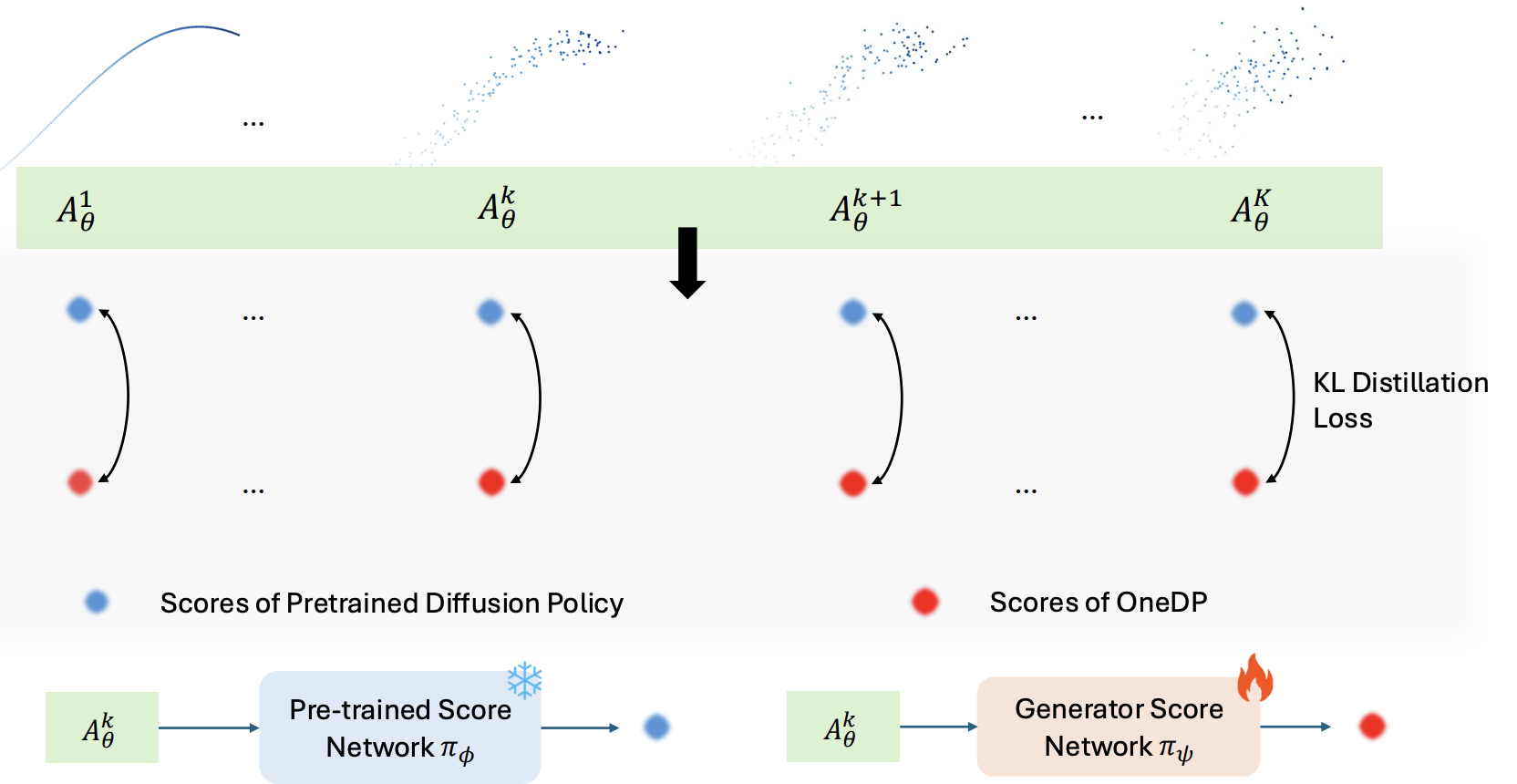 |
One-Step Diffusion Policy: Fast Visuomotor Policies via Diffusion Distillation
Zhendong Wang, Zhaoshuo Li, Ajay Mandlekar, Zhenjia Xu, Jiaojiao Fan, Yashraj Narang, Linxi Fan, Yuke Zhu, Yogesh Balaji, Mingyuan Zhou, Ming-Yu Liu, Yu Zeng
ICML 2025
[pdf] [website]
|
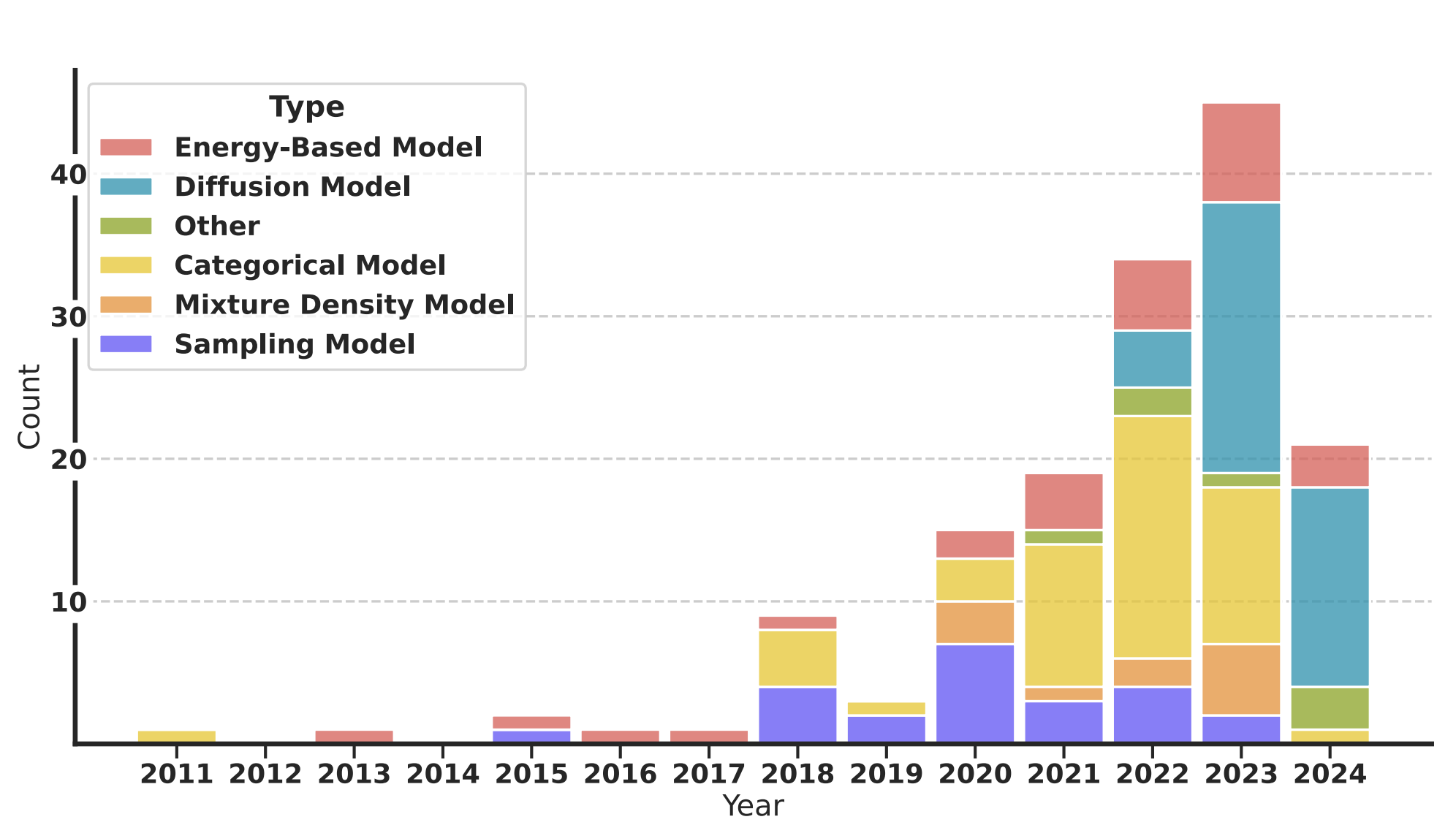 |
Deep Generative Models in Robotics: A Survey on Learning from Multimodal Demonstrations
Julen Urain, Ajay Mandlekar, Yilun Du, Mahi Shafiullah, Danfei Xu, Katerina Fragkiadaki, Georgia Chalvatzaki, Jan Petersn
IEEE T-RO
[pdf]
|
 |
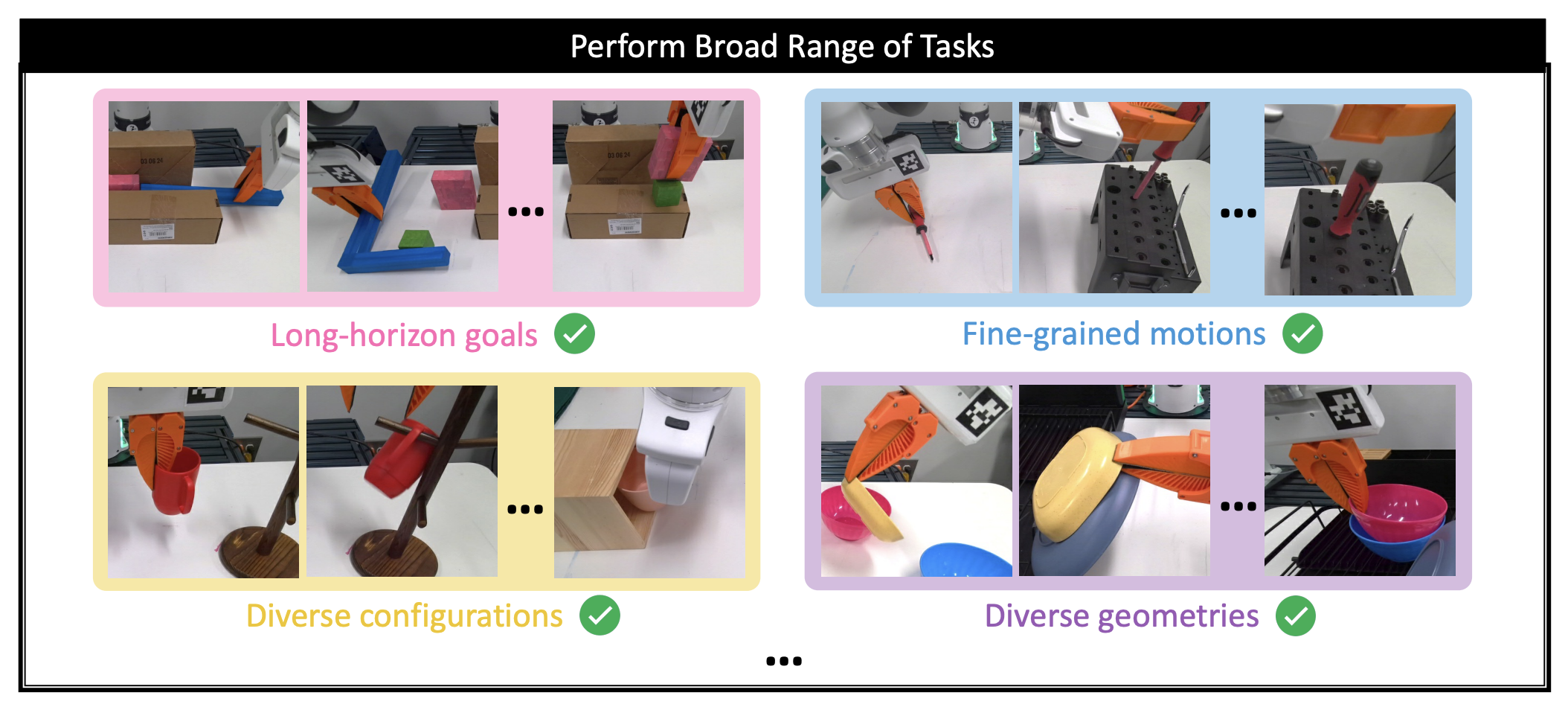
SkillMimicGen: Automated Demonstration Generation for Efficient Skill Learning and Deployment
Caelan Garrett*, Ajay Mandlekar*, Bowen Wen, Dieter Fox
CoRL 2024
[pdf] [website]
|
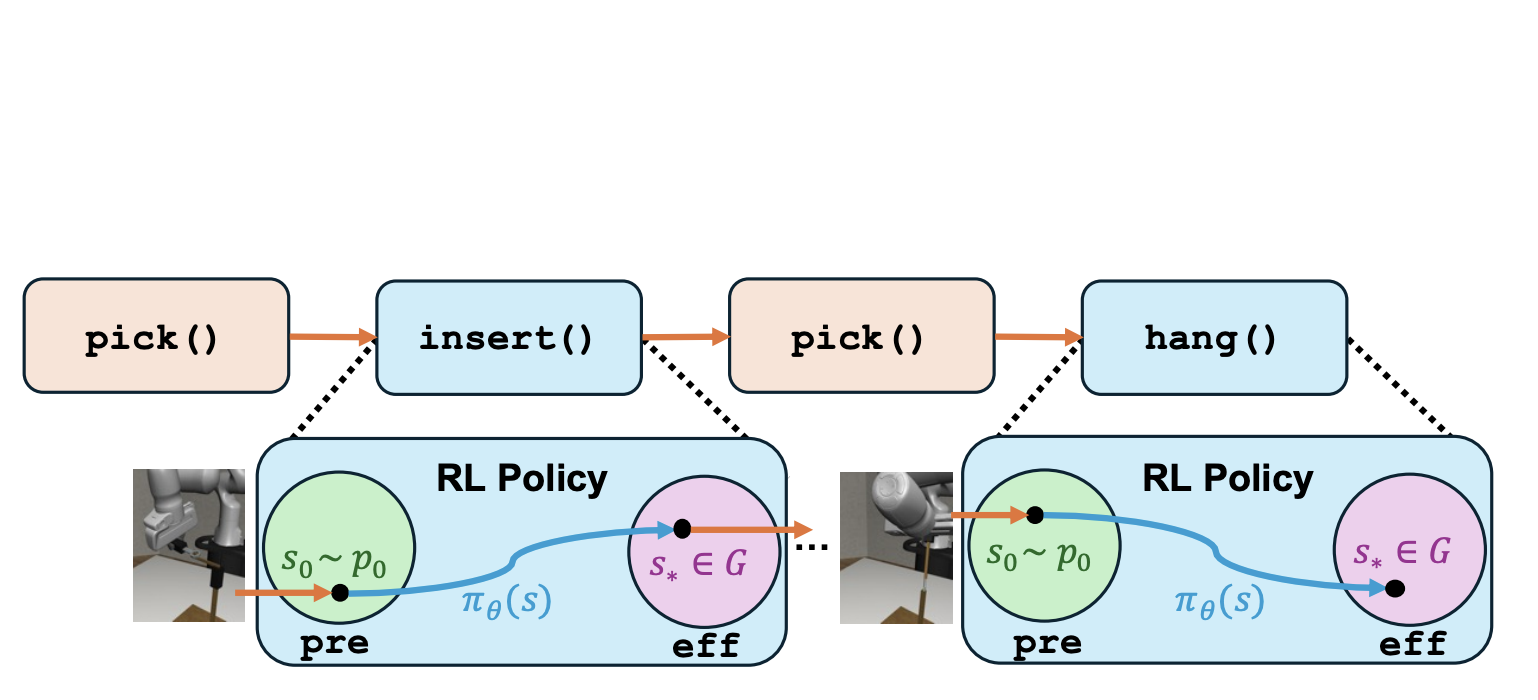 |
SPIRE: Synergistic Planning, Imitation, and Reinforcement Learning for Long-Horizon Manipulation
Zihan Zhou, Animesh Garg, Dieter Fox, Caelan Garrett*, Ajay Mandlekar*
CoRL 2024
[pdf] [website]
|
 |
NOD-TAMP: Generalizable Long-Horizon Planning with Neural Object Descriptors
Shuo Cheng, Caelan Garrett*, Ajay Mandlekar*, Danfei Xu
CoRL 2024
[pdf] [website]
|
 |
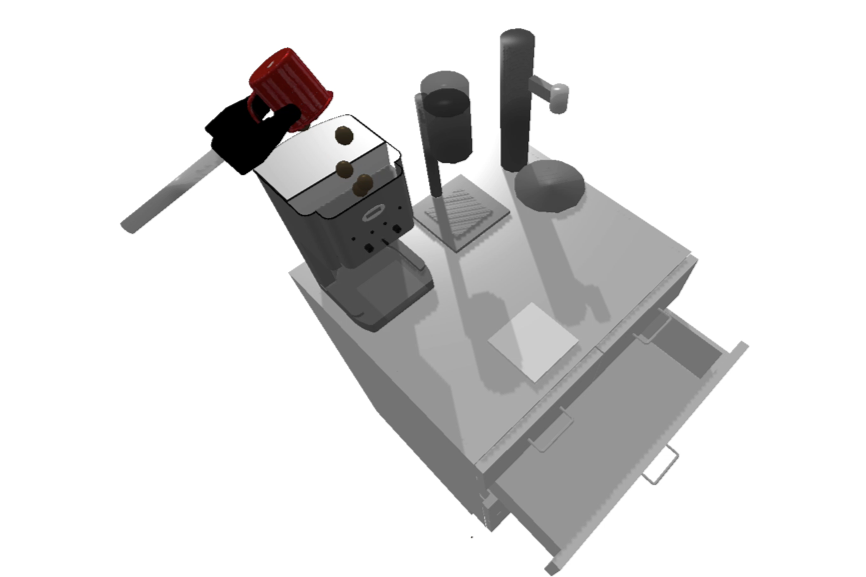
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Soroush Nasiriany, Abhiram Maddukuri, Lance Zhang, Adeet Parikh, Aaron Lo, Abhishek Joshi, Ajay Mandlekar, Yuke Zhu
RSS 2024
[pdf] [website] [code]
|
 |
Signatures Meet Dynamic Programming: Generalizing Bellman Equations for Trajectory Following
Motoya Ohnishi, Iretiayo Akinola, Jie Xu, Ajay Mandlekar, Fabio Ramos
L4DC 2024
[pdf] [website]
|
 |
IntervenGen: Interventional Data Generation for Robust and Data-Efficient Robot Imitation Learning
Ryan Hoque, Ajay Mandlekar*, Caelan Garrett*, Ken Goldberg, Dieter Fox
IROS 2024
[pdf] [website]
|
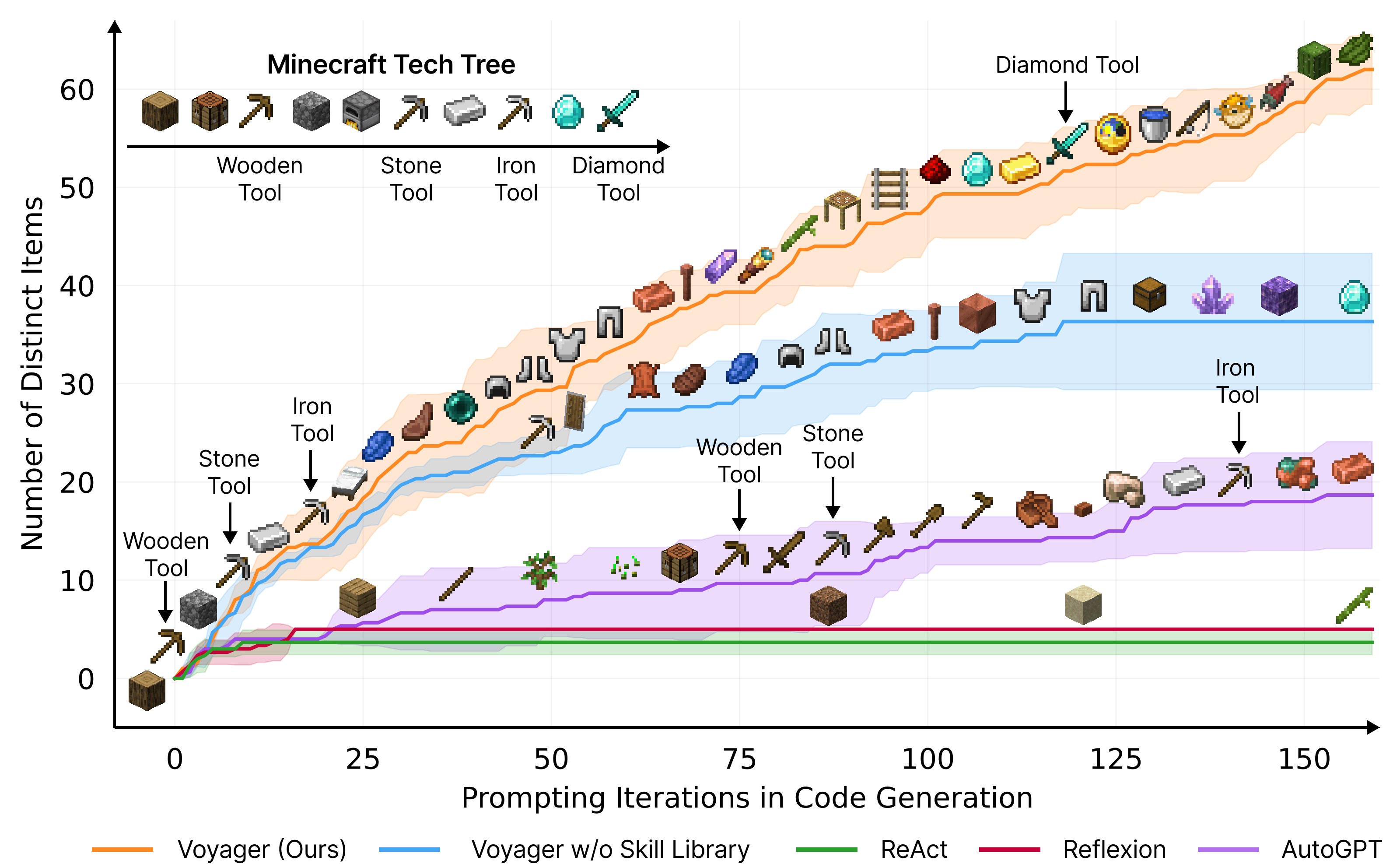 |
Voyager: An Open-Ended Embodied Agent with Large Language Models
Guanzhi Wang, Yuqi Xie, Yunfan Jiang*, Ajay Mandlekar*, Chaowei Xiao, Yuke Zhu, Linxi Fan†, Anima Anandkumar†
TMLR 2024
[pdf] [website] [code]
|
 |
Human-in-the-Loop Task and Motion Planning for Imitation Learning
Ajay Mandlekar*, Caelan Garrett*, Danfei Xu, Dieter Fox
CoRL 2023
Best Paper Runner-Up and Oral at CoRL 2023 Deployable Workshop
[pdf] [website]
|
 |
Imitating Task and Motion Planning with Visuomotor Transformers
Murtaza Dalal, Ajay Mandlekar*, Caelan Garrett*, Ankur Handa, Ruslan Salakhutdinov, Dieter Fox
CoRL 2023
[pdf] [website] [code]
|
 |
Active Task Randomization: Learning Visuomotor Skills for Sequential Manipulation by Proposing Feasible and Novel Tasks
Kuan Fang*, Toki Migimatsu*, Ajay Mandlekar, Li Fei-Fei, Jeannette Bohg
IROS 2023
[pdf] [website]
|
 |
ORBIT: A Unified Simulation Framework for Interactive Robot Learning Environments
Mayank Mittal, Calvin Yu, Qinxi Yu, Jingzhou Liu, Nikita Rudin, David Hoeller, Jia Lin Yuan, Pooria Poorsarvi Tehrani, Ritvik Singh, Yunrong Guo, Hammad Mazhar, Ajay Mandlekar, Buck Babich, Gavriel State, Marco Hutter, Animesh Garg
IEEE Robotics and Automation Letters (RA-L) and ICRA 2023
[pdf] [website] [code]
|
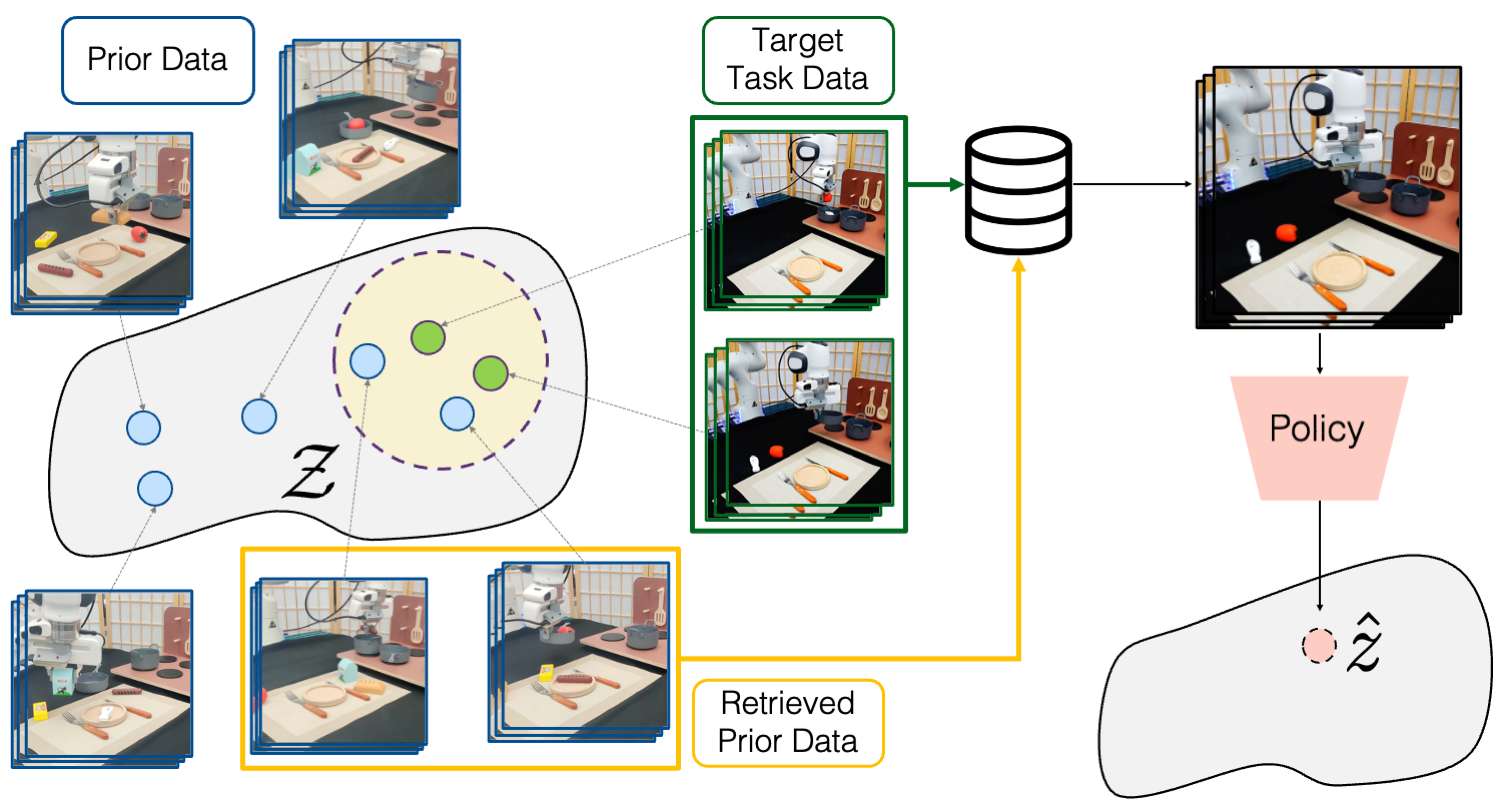 |
Learning and Retrieval from Prior Data for Skill-based Imitation Learning
Soroush Nasiriany, Tian Gao, Ajay Mandlekar, Yuke Zhu
CoRL 2022
[pdf] [website]
|
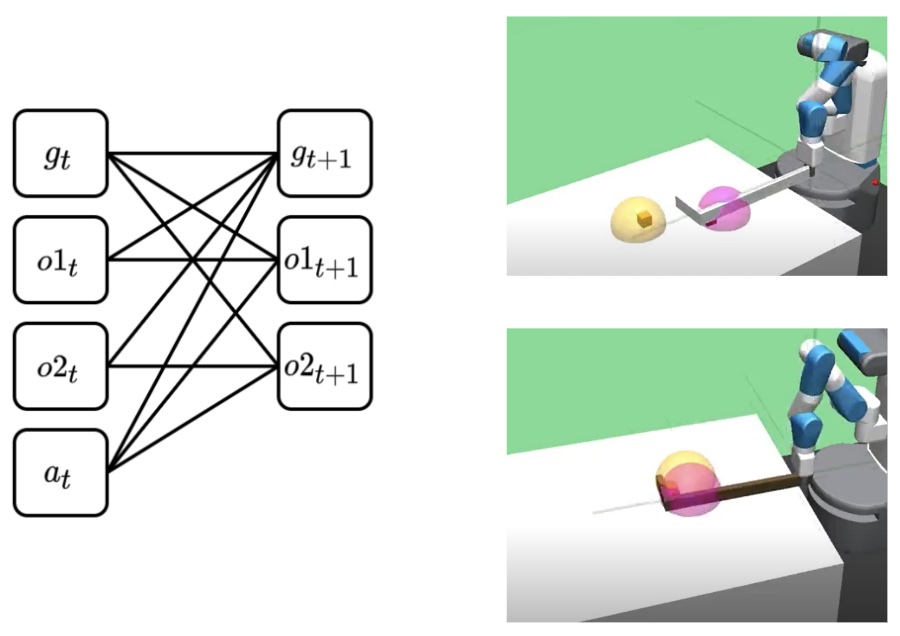 |
MoCoDA: Model-based Counterfactual Data Augmentation
Silviu Pitis, Elliot Creager, Ajay Mandlekar, Animesh Garg
NeurIPS 2022
[pdf] [website] [code]
|
 |
MineDojo: Building Open-Ended Embodied Agents with Internet-Scale Knowledge
Linxi Fan, Guanzhi Wang*, Yunfan Jiang*, Ajay Mandlekar, Yuncong Yang, Haoyi Zhu, Andrew Tang, De-An Huang, Yuke Zhu, Anima Anandkumar
NeurIPS 2022 Datasets and Benchmarks Track
Outstanding Paper Award
[pdf] [website] [code] [blog]
|
 |
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation
Ajay Mandlekar, Danfei Xu, Josiah Wong, Soroush Nasiriany, Chen Wang, Rohun Kulkarni, Li Fei-Fei, Silvio Savarese, Yuke Zhu, Roberto Martín-Martín
CoRL 2021
Oral (6.5% acceptance)
[pdf] [website] [video] [code] [blog] [talk]
|
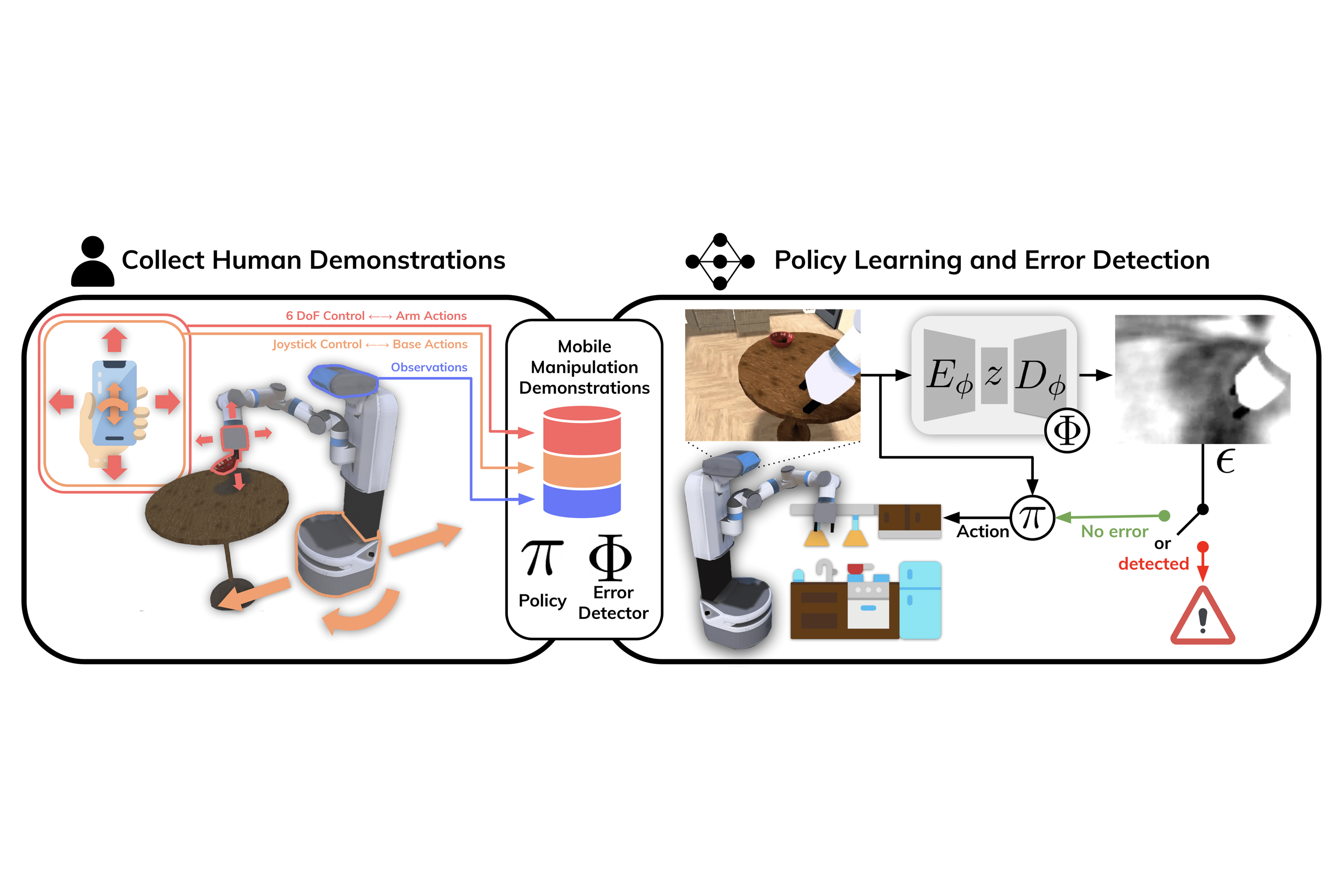 |
Error-Aware Imitation Learning from Teleoperation Data for Mobile Manipulation
Josiah Wong, Albert Tung, Andrey Kurenkov, Ajay Mandlekar, Li Fei-Fei, Silvio Savarese, Roberto Martín-Martín
CoRL 2021
[pdf] [website] [video]
|
 |
S4RL: Surprisingly Simple Self-Supervision for Offline Reinforcement Learning
Samarth Sinha, Ajay Mandlekar, Animesh Garg
CoRL 2021
[pdf]
|
 |
Generalization through Hand-Eye Coordination: An Action Space for Learning Spatially-Invariant Visuomotor Control
Chen Wang*, Rui Wang*, Ajay Mandlekar, Li Fei-Fei, Silvio Savarese, Danfei Xu
IROS 2021
[pdf] [website]
|
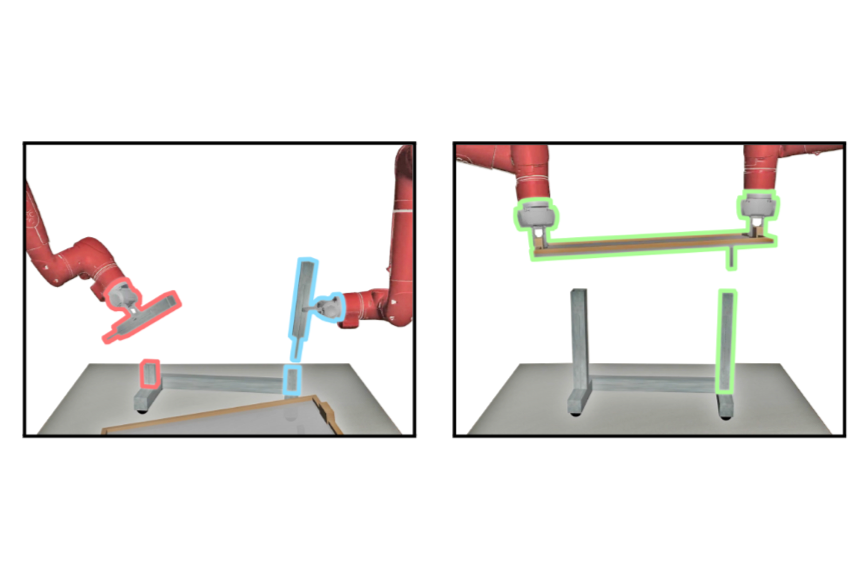 |
Learning Multi-Arm Manipulation Through Collaborative Teleoperation
Albert Tung*, Josiah Wong*, Ajay Mandlekar, Roberto Martín-Martín, Yuke Zhu, Li Fei-Fei, Silvio Savarese
ICRA 2021
Best Multi-Robotic Systems Paper Finalist
[pdf] [website] [video]
|
 |
Deep Affordance Foresight: Planning Through What Can Be Done in the Future
Danfei Xu, Ajay Mandlekar, Roberto Martín-Martín, Yuke Zhu, Silvio Savarese, Li Fei-Fei
ICRA 2021
[pdf] [website] [video] [talk]
|
 |
Human-in-the-Loop Imitation Learning using Remote Teleoperation
Ajay Mandlekar, Danfei Xu*, Roberto Martin-Martin*, Yuke Zhu, Li Fei-Fei, Silvio Savarese
Technical Report 2020
[pdf] [website] [video]
|
 |
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Martin-Martin
Technical Report
[pdf] [website]
|
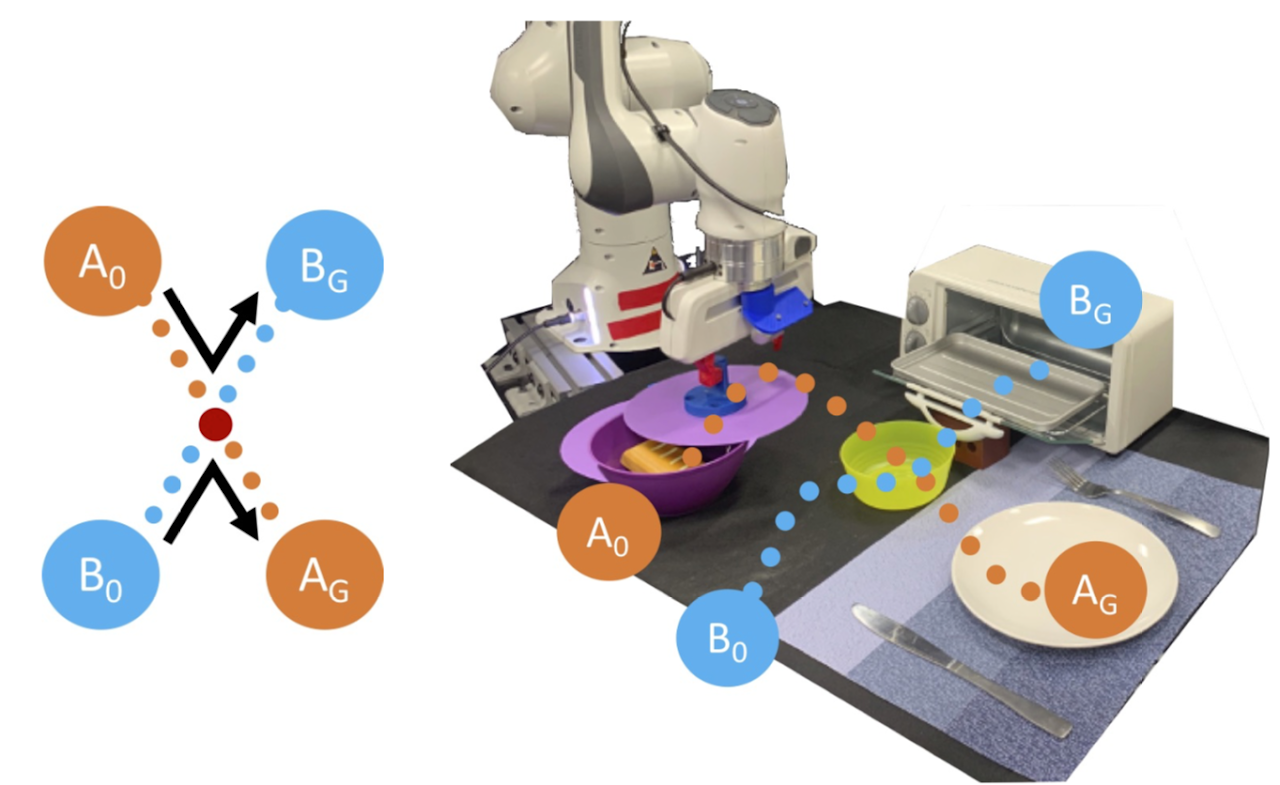 |
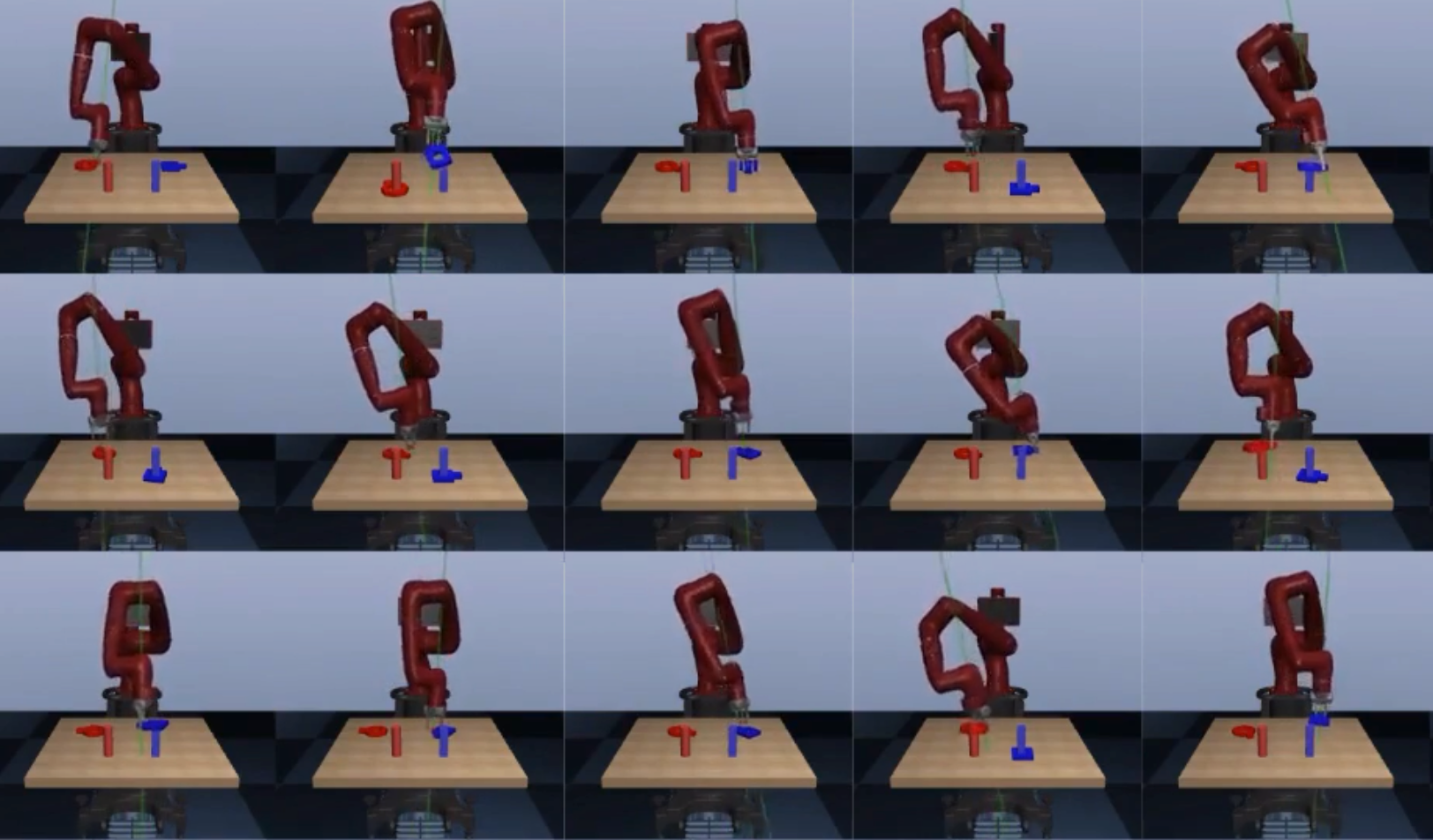
Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations
Ajay Mandlekar*, Danfei Xu*, Roberto Martín-Martín, Silvio Savarese, Li Fei-Fei
RSS 2020
[pdf] [website] [video]
|
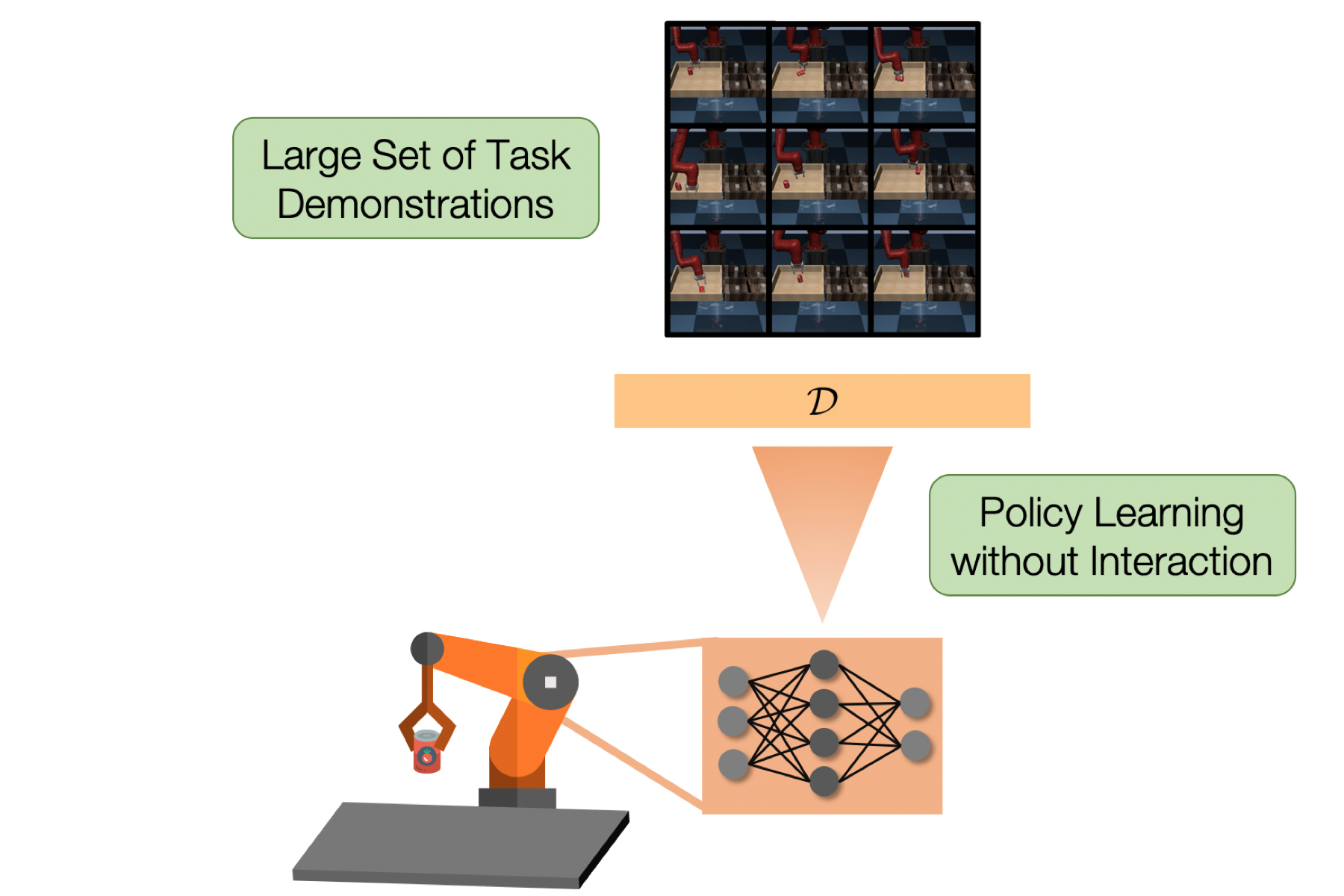 |
IRIS: Implicit Reinforcement without Interaction at Scale for Learning Control from Offline Robot Manipulation Data
Ajay Mandlekar, Fabio Ramos, Byron Boots, Silvio Savarese, Li Fei-Fei, Animesh Garg, Dieter Fox
ICRA 2020
[pdf] [website] [video] [talk]
|
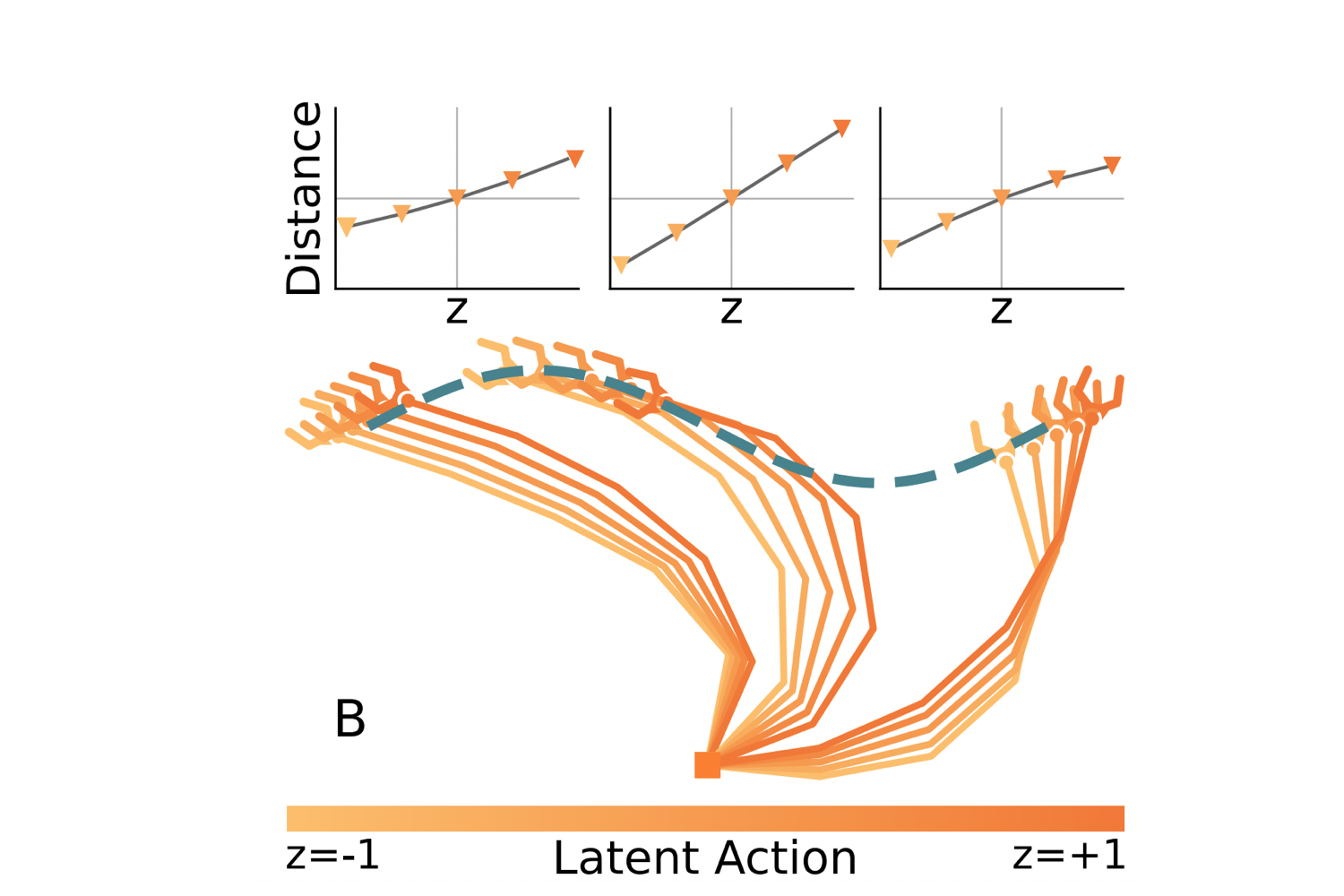 |
Controlling Assistive Robots with Learned Latent Actions
Dylan P. Losey, Krishnan Srinivasan, Ajay Mandlekar, Animesh Garg, Dorsa Sadigh
ICRA 2020
[pdf] [blog] [video]
|
 |
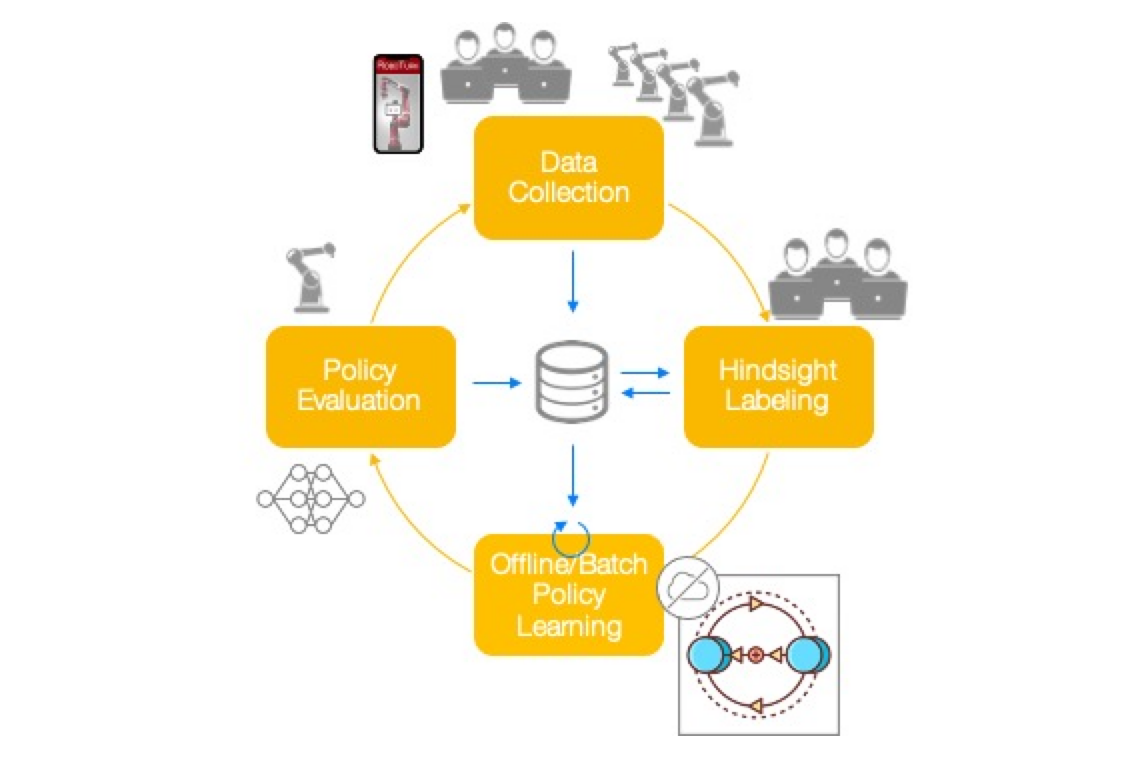
Scaling Robot Supervision to Hundreds of Hours with RoboTurk: Robotic Manipulation Dataset through Human Reasoning and Dexterity
Ajay Mandlekar, Jonathan Booher, Max Spero, Albert Tung, Anchit Gupta, Yuke Zhu, Animesh Garg, Silvio Savarese, Li Fei-Fei
IROS 2019
Best Cognitive Robotics Paper Finalist
[pdf] [website] [blog] [talk]
|
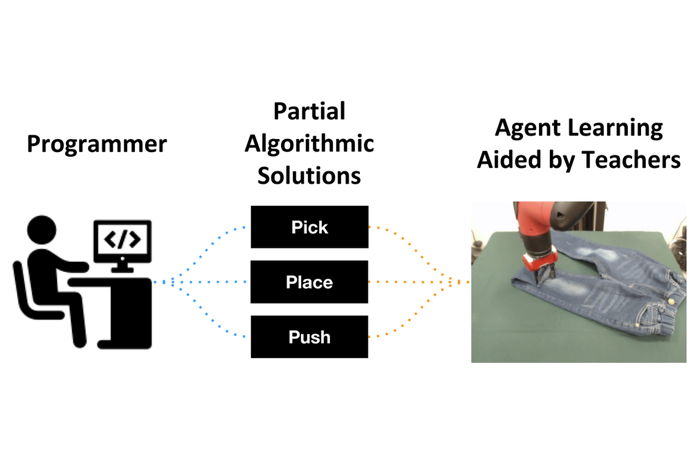 |
AC-Teach: A Bayesian Actor-Critic Method for Policy Learning with an Ensemble of Suboptimal Teachers
Andrey Kurenkov*, Ajay Mandlekar*, Roberto Martín-Martín, Silvio Savarese, Animesh Garg
CoRL 2019
[pdf] [website] [blog] [talk]
|
 |
RoboTurk: A Crowdsourcing Platform for Robotic Skill Learning through Imitation
Ajay Mandlekar, Yuke Zhu, Animesh Garg, Jonathan Booher, Max Spero, Albert Tung, Julian Gao, John Emmons, Anchit Gupta, Emre Orbay, Silvio Savarese, Li Fei-Fei
CoRL 2018
[pdf] [website] [talk]
|
 |
Adversarially Robust Policy Learning: Active Construction of Physically-Plausible Perturbations
Ajay Mandlekar*, Yuke Zhu*, Animesh Garg*, Li Fei-Fei, Silvio Savarese
IROS 2017
[pdf] [website] [video]
|
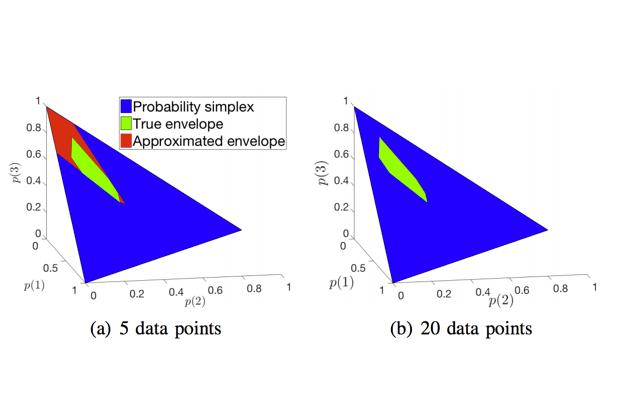 |
Risk-sensitive Inverse Reinforcement Learning via Coherent Risk Models
Anirudha Majumdar, Sumeet Singh, Ajay Mandlekar, Marco Pavone
RSS 2017
[pdf]
|
|