Dmitri Dolgov

|
As of February 2009, I work for an
advertising company.
Before that I was a Senior Research Scientist in the AI & Robotics group at the Toyota Research Institute in Ann Arbor, MI and a Visiting Researcher at the Stanford University in Palo Alto, CA, where I worked with Sebastian Thrun. I received a PhD in Computer Science with the focus on Artificial Intelligence from the University of Michigan in February of 2006 for work in the area of combinatorial resource allocation and stochastic planning, under the supervision of Edmund Durfee. See my thesis for details. In 2008, I was named one of the AI's Ten To Watch by IEEE Intelligent Systems. I also have an MS in applied physics and math from the Moscow Institute of Physics and Technology. You can contact me at . |
:: Research Interests & Projects ::

|
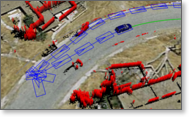
Autonomous Driving and the DARPA Urban ChallengeThe DARPA Urban Challenge, held in November 2007, was a competition between robotic vehicles in a city-like environment. The cars had to operate completely autonomously while driving alongside human drivers and other robots. I worked with the Stanford Racing Team and contributed to path-planning algorithms for our car, Junior. Junior won the second place in the Urban Challenge. First place went to CMU's Tartan Racing, and Virginia Tech's Victor Tango took third. Some of the technical aspects of Junior's hardware and software are described in our JFR-08 paper. |
|
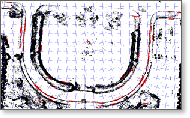
Path PlanningI'm interested in practical path-planning algorithms for autonomous vehicles that operate in unknown environments and must re-plan continuously in response to sensor data. The paths have to be near-optimal in length, safe, and smooth. Some of our recent work in this area that uses heuristic search, potential fields, and continuous numerical optimization is described in our ISER-08 and STAIR-08 papers. |
|
Finding Structure in Unknown EnvironmentsRobots often have to operate in environments about which they possess very little prior knowledge. However, often these environment are structured. For example, driving areas such as construction zones or parking lots are often chaotic, but nonetheless have significant structure to them. A robot that can recognise this structure will be better equipped to act appropriately in the environment.Detecting environment structure from sensor data and utilizing that structure to make better decisions is a problem that I'm interested in. Some work that takes a step towards this goal is described in our RSS-08 paper. |

|
Stochastic Planning and Resource AllocationFor my PhD, I worked on decision-making in stochastic multiagent systems (modeled as multiagent Markov decision processes), where agents must take into account the effects of their actions on limited shared resources. This work is described in my thesis and a JAIR-06 paper. |
:: Papers & Presentations ::
Paper title links to page with more details, including abstract and BibTex.| 2009 | |||
| ICRA-09a |
Autonomous Driving in Semi-Structured Environments: Mapping and Planning Dmitri Dolgov, and Sebastian Thrun In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA-09). 2009. (To Appear) | ||
| ICRA-09b |
Autonomous Driving in a Multi-level Parking Structure Rainer Kummerle, Dirk Hahnel, Dmitri Dolgov, Sebastian Thrun, and Wolfram Burgard In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA-09). 2009. (To Appear) | ||
| 2008 | |||
| AAET-08 |
Junior: The Stanford Racing Team's Robot in the 2007 DARPA Urban Challenge. M. Montemerlo, J. Becker, S. Bhat, H. Dahlkamp, D. Dolgov, S. Ettinger, D. Haehnel, T. Hilden, G. Hoffmann, B. Hunke, D. Johnston, S. Klumpp, D. Langer, A. Levandowski, J. Levinson, J. Marcil, D. Orenstein, J. Paefgen, I. Penny, A. Petrovskaya, M. Pflueger, G. Stanek, D. Stavens, A. Vogt,, and S. Thrun In Proceedings of the Symposium on Automation, Assistence, and Embedded Real Time Platforms for Transportation 2008 (AAET08). 2008. | ||
| JFR-08 |
The Stanford Entry in the Urban Challenge Michael Montemerlo, Jan Becker, Suhrid Bhat, Hendrik Dahlkamp, Dmitri Dolgov, Scott Ettinger, Dirk Haehnel, Tim Hilden, Gabe Hoffmann, Burkhard Huhnke, Doug Johnston, Stefan Klumpp, Dirk Langer, Anthony Levandowski, Jesse Levinson, Julien Marcil, David Orenstein, Johannes Paefgen, Isaac Penny , Anna Petrovskaya, Mike Pflueger, Ganymed Stanek, David Stavens, Antone Vogt, and Sebastian Thrun In Journal of Field Robotics. 2008. | ||
| IROS-08 |
Apprenticeship learning for motion planning, with application to parking lot navigation Pieter Abbeel, Dmitri Dolgov, Andrew Ng, and Sebastian Thrun In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS-08). September 2008. |
|
|
| ISER-08 |
Path Planning for Autonomous Driving in Unknown Environments Dmitri Dolgov, Sebastian Thrun, Michael Montemerlo, and James Diebel In Proceedings of the Eleventh International Symposium on Experimental Robotics(ISER-08). July 2008. | ||
| RSS-08 |
Detection of Principal Directions in Unknown Environments for Autonomous Navigation Dmitri Dolgov, and Sebastian Thrun In Proceedings of the Robotics: Science and Systems IV (RSS-08). June 2008. |
|
|
| STAIR-08 |
Practical Search Techniques in Path Planning for Autonomous Driving Dmitri Dolgov, Sebastian Thrun, Michael Montemerlo, and James Diebel In Proceedings of the First International Symposium on Search Techniques in Artificial Intelligence and Robotics (STAIR-08). June 2008. |
|
|
| 2007 | |||
| NIPS-07 |
Stanford Racing Team's Parking Planner and Beyond Dmitri Dolgov, Sebastian Thrun, Michael Montemerlo, and James Diebel In Proceedings of the NIPS-07 Workshop, The Urban Challenge -- Perspectives of Autonomous Driving. December 2007. | ||
| AAMAS-07 |
Combinatorial Resource Scheduling for Multiagent MDPs Dmitri A. Dolgov, Michael R. James, and Michael E. Samples In Proceedings of the Sixth International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS-07). Pages 657--664. May 2007. |
|
|
| IJCAI-07 |
Improving Anytime Point-Based Value Iteration Using Principled Point Selections Michael R. James, Michael E. Samples, and Dmitri A. Dolgov In Proceedings of the Twentieth International Joint Conference on Artificial Intelligence (IJCAI-07). Pages 865--871. January 2007. |
|
|
| 2006 | |||
| JAIR-06 |
Resource Allocation Among Agents with MDP-Induced Preferences Dmitri A. Dolgov, and Edmund H. Durfee In Journal of Artificial Intelligence Research (JAIR-06), 27. Pages 505--549. December 2006. |
|
|
| AMAI-06 |
Symmetric Approximate Linear Programming for Factored MDPs with Application to Constrained Problems Dmitri A. Dolgov, and Edmund H. Durfee In Annals of Mathematics and Artificial Intelligence. Pages 273--293. 2006. |
|
|
| PHD-06 |
Integrated Resource Allocation and Planning in Stochastic Multiagent Environments Dmitri A. Dolgov PhD Dissertation, Computer Science Department, University of Michigan. February 2006. |
|
|
| AAAI/SS-06 |
Coordinated Plan Management Using Multiagent MDPs David J. Musliner, Edmund H. Durfee, Jianhui Wu, Dmitri A. Dolgov, Robert P. Goldman, and Mark S. Boddy In Working Notes of the AAAI Spring Symposium on Distributed Plan and Schedule Management. March 2006. | ||
| AAMAS-06 |
Resource Allocation Among Agents with Preferences Induced by Factored MDPs Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Fifth International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS-06). Pages 297--304. May 2006. |
|
|
| ISAIM-06 |
Symmetric Primal-Dual Approximate Linear Programming for Factored MDPs Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Ninth International Symposiums on Artificial Intelligence and Mathematics (ISAIM 2006). January 2006. |
|
|
| 2005 | |||
| BOOK-05 |
The Effects of Locality and Asymmetry in Large-Scale Multiagent MDPs Dmitri A. Dolgov, and Edmund H. Durfee In Paul Scerri, Regis Vincent, Roger Mailler (Eds.) Coordination of Large-Scale Multiagent Systems. Pages 3--25. 2005. (Book Chapter) | ||
| ICINCO-05 |
Efficient Linear Approximations to Stochastic Vehicular Collision-Avoidance Problems Dmitri A. Dolgov, and Kenneth Laberteaux In Proceedings of the Second International Conference on Informatics in Control, Automation, and Robotics (ICINCO-05). September 2005. | ||
| IJCAI-05 |
Stationary Deterministic Policies for Constrained MDPs with Multiple Rewards, Costs, and Discount Factors Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05). Pages 1326--1332. August 2005. |
|
|
| AAMAS-05 |
Computationally-Efficient Combinatorial Auctions for Resource Allocation in Weakly-Coupled MDPs Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS-05). Pages 657--664. July 2005. |
|
|
| AAAI-05 |
Towards Exploiting Duality in Approximate Linear Programming for MDPs Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Twentieth National Conference on Artificial Intelligence (AAAI-05). June 2005. (Poster) | ||
| 2004 | |||
| AAMAS-04 |
Graphical Models in Local, Asymmetric Multi-Agent Markov Decision Processes Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS-04). Pages 956--963. July 2004. |
|
|
| ICAPS-04 |
Optimal Resource Allocation and Policy Formulation in Loosely-Coupled Markov Decision Processes Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Fourteenth International Conference on Automated Planning and Scheduling (ICAPS 04). Pages 315--324. June 2004. |
|
|
| ISAIM-04 |
Approximate Probabilistic Constraints and Risk-Sensitive Optimization Criteria in Markov Decision Processes Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Eighth International Symposiums on Artificial Intelligence and Mathematics (ISAIM 7-2004). January 2004. |
|
|
| CLIMA-04 |
Resource Allocation and Multiagent Policy Formulation for Resource-Limited Agents Under Uncertainty Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Fourth International Workshop on Computational Logic in Multi-Agent Systems (CLIMA IV). Pages 109--125. January 2004. | ||
| 2003 | |||
| TR-03 |
Constructing Optimal Policies for Agents with Constrained Architecture Dmitri A. Dolgov, and Edmund H. Durfee Technical Report, Electrical Engineering and Computer Science, University of Michigan, CSE-TR-476-03. 2003. | ||
| AAMAS-03 |
Constructing Optimal Policies for Agents with Constrained Architectures (abstract) Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Second International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS-03). Pages 974--975. 2003. (Poster) | ||
| IJCAI-03 |
Approximating Optimal Policies for Agents with Limited Execution Resources Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the Eighteenth International Joint Conference on Artificial Intelligence (IJCAI-03). Pages 1107--1112. 2003. |
|
|
| 2002 | |||
| AAMAS-02 |
Satisficing Strategies for Resource-Limited Policy Search in Dynamic Environments Dmitri A. Dolgov, and Edmund H. Durfee In Proceedings of the First International Joint Conference on Autonomous Agents and Multiagent Systems. Pages 1325--1332. 2002. |

{kind=link}